Issue:
I have six XL330-M288-T motors connected to a robot. I have previously controlled the motors using the open-rb microcontroller, and the motors were able to move the robot with adequate torque, but now I want to control them using a computer and the U2D2 with a 5v power supply/battery. The problem is that the motors run fine when in the air and under no load. But when the robot is placed under any load or on the ground to lift itself, it stops/shuts down and seems to turn off the torque mode. I have tried putting the motors to operate at their maximum torque, but this issue persists.
DYNAMIXEL Servo:
XL330-M288-T
DYNAMIXEL Controller:
U2D2, USB connection, and computer
When you used your robot with the OpenRB-150, how did you power the 6 actuators? Via VIN(DXL) jumper and a wall-plugged power supply?
What kind of 5V battery are you using now to power the 6 DXLs? Phone battery type? Your battery may not have enough capacity to handle the current needed. Also you should try NOT to daisy chain more than 4 DXLs per chain. So try two parallel chains of 3 DXLs each chain and each chain with its own battery and see. You should be able to use 4 AA batteries per chain.
Or try these kind of Lithium battery. The higher the mAh rating the better.
Also there is another hardware design solution that you missed. As you already have an OpenRB-150, there is a way to make the 150 behaves like a mini U2D2 (up to 1 Mbps baud rate only) + as a DXL Power Hub, then you can control your DXLs directly from the PC also, please see this post:
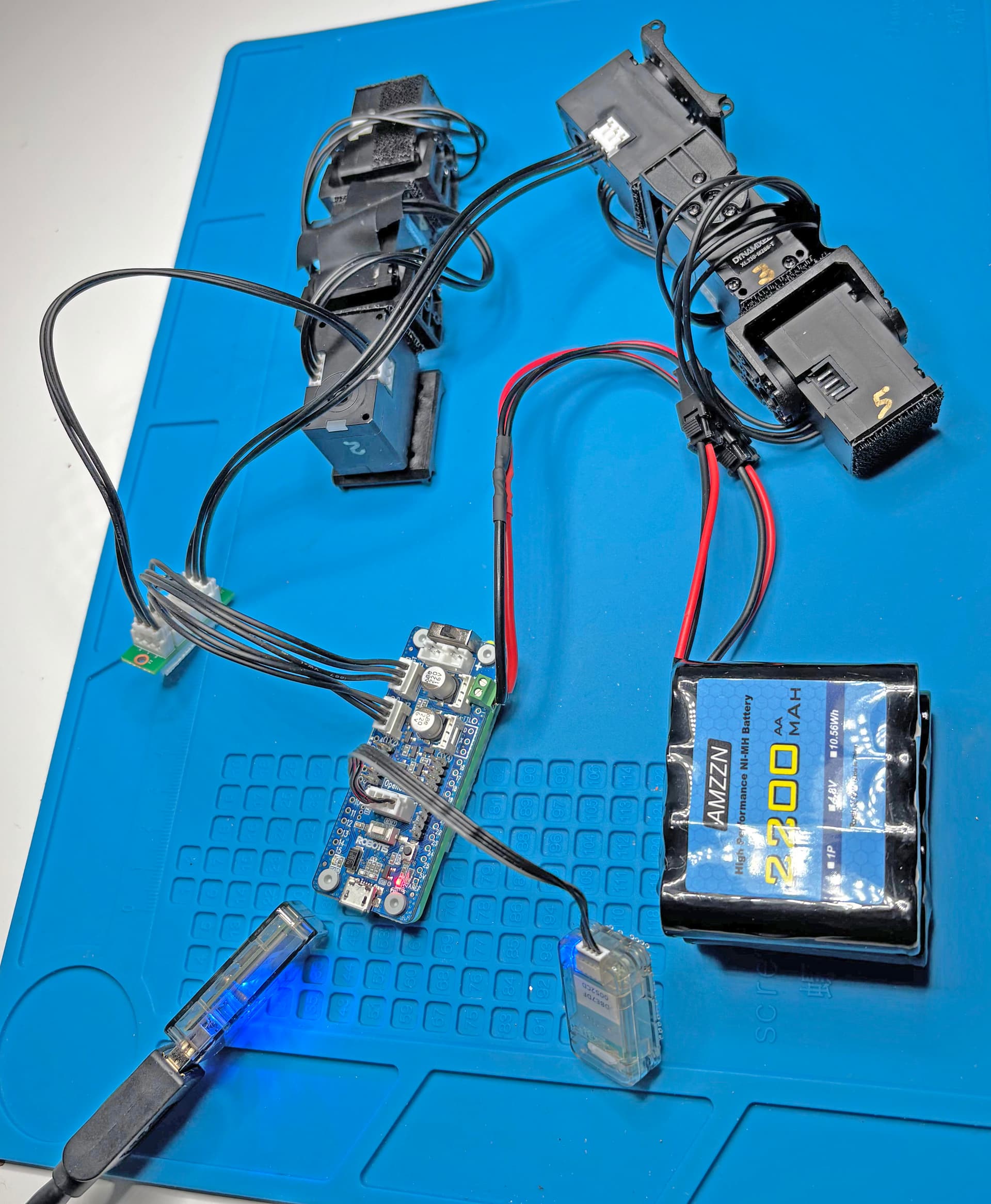
UPDATE 5/3/2025
I also found that this Power Setup using 2 NiMH Batteries in parallel (4.8 V each and 2200 mAh each) can power an OpenCM-904 and 6 XL-330s OK. However, 1 battery pack was not enough, so look for at least 4400 mAh for your battery solution.
@roboterr How can i connect rc100b and cannon shooter from Robotis STEM LEVEL 2 with İr Receiver? we made cannon shooter module from ROBOTİS STEM LEVEL 2 and i should connect it with rc100b. i have ir receiver but i couldnt connect it
can you help me how to do it?
its urgent! can you contact me
Thank you, I was able to get the 6 XL330 motors running with the OpenRB usb2dynamixel code, I plan to get the Lithium-Ion 4400mAh battery. Do I need to use a dc step converter to step up to 5v or can it work with the 3.7v?
You need to get into the habit of checking out the Robotis e-manual web site for these sorts of questions and then you can figure them out on your own.
For example this link shows the voltages that the 150 can work with: i.e. 3.7V to 12.6V.
And this link shows what voltages can the XL-330 handle: i.e. 3.7V to 6.0V
So your power configuration with a LiPo at 3.7V and 4400 mAh for operating the 150 and the 6 XL-330s should work. If you plan to add more peripherals to your robot later you may have to add another LiPo in parallel.