When you used your robot with the OpenRB-150, how did you power the 6 actuators? Via VIN(DXL) jumper and a wall-plugged power supply?
What kind of 5V battery are you using now to power the 6 DXLs? Phone battery type? Your battery may not have enough capacity to handle the current needed. Also you should try NOT to daisy chain more than 4 DXLs per chain. So try two parallel chains of 3 DXLs each chain and each chain with its own battery and see. You should be able to use 4 AA batteries per chain.
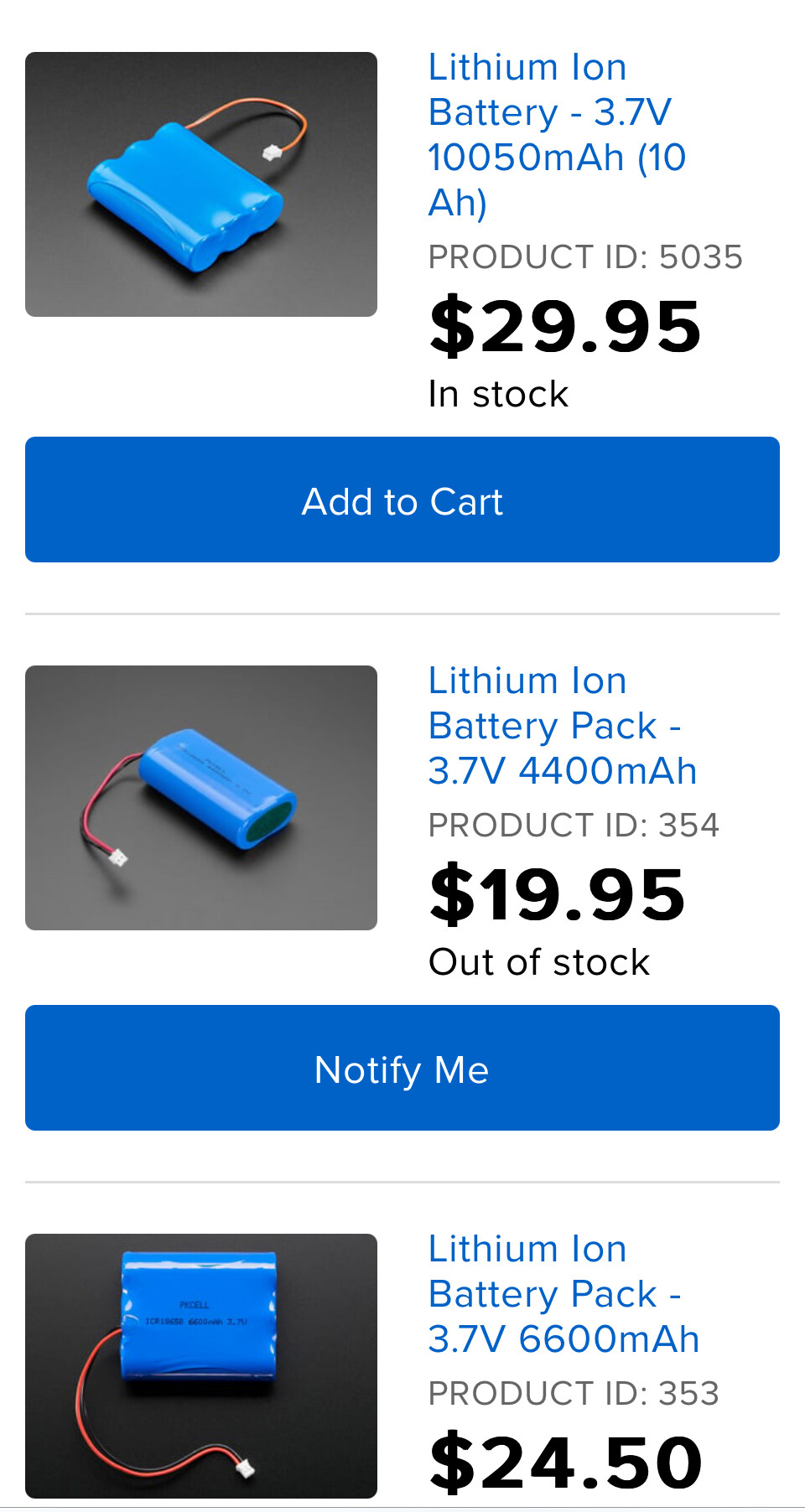
Or try these kind of Lithium battery. The higher the mAh rating the better.
Also there is another hardware design solution that you missed. As you already have an OpenRB-150, there is a way to make the 150 behaves like a mini U2D2 (up to 1 Mbps baud rate only) + as a DXL Power Hub, then you can control your DXLs directly from the PC also, please see this post:
UPDATE 5/3/2025
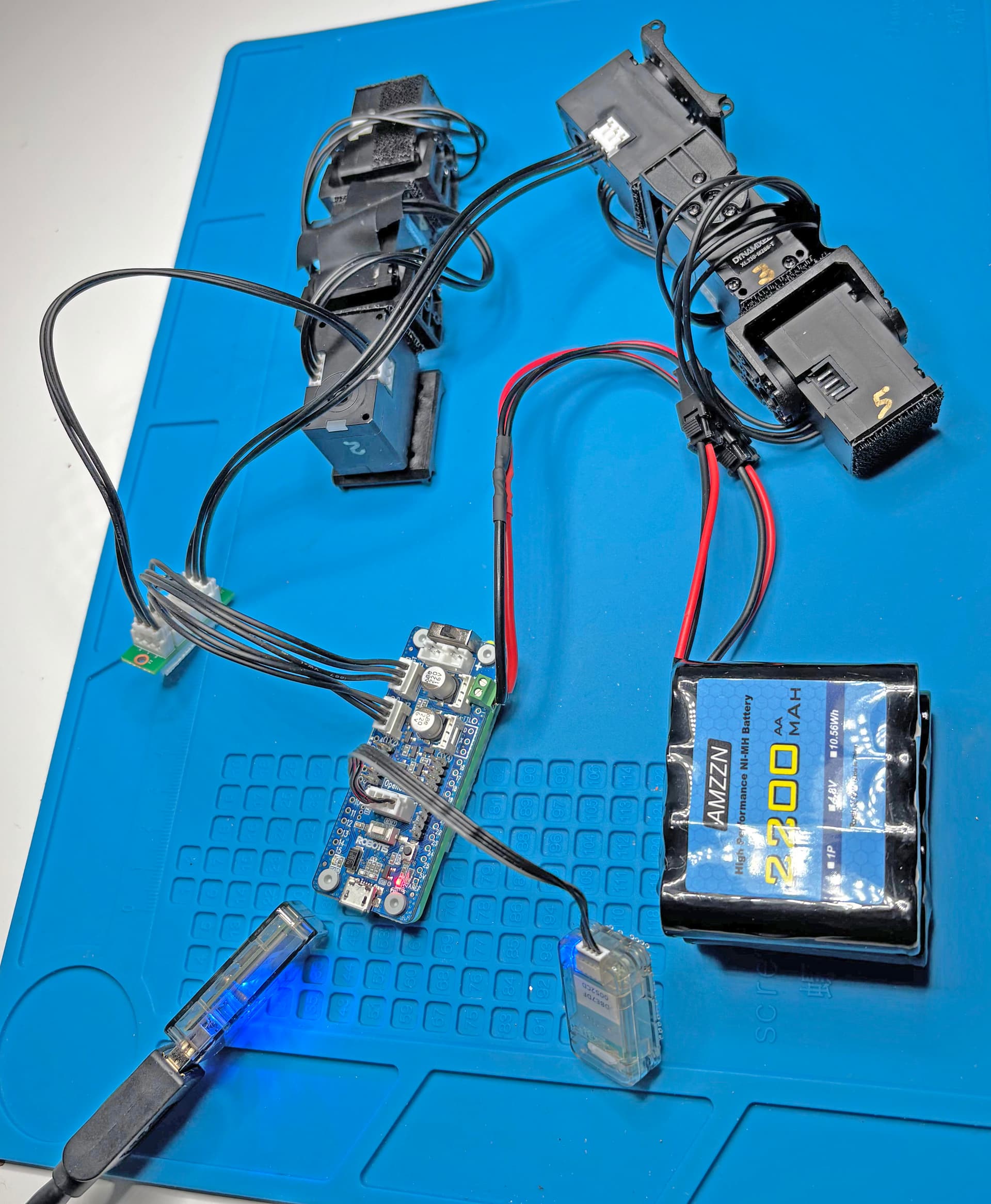
I also found that this Power Setup using 2 NiMH Batteries in parallel (4.8 V each and 2200 mAh each) can power an OpenCM-904 and 6 XL-330s OK. However, 1 battery pack was not enough, so look for at least 4400 mAh for your battery solution.