안녕하세요. 현재 XW430 모터를 사용 중입니다.
protocol2.0 manual에 나와 있는 5. 3. 3. 예제를 사용하여 파이썬으로 코드 구성 후 485통신으로 데이터를 전송하여 움직임을 구현 하였습니다.
여기서 원하는 각도로 도달하기 위해 모터가 너무 빨리 움직입니다. 움직이는 속도를 줄일 수 있는지 문의드립니다.
예제 코드(5. 3. 3. )
|0xFF|0xFF|0xFD|0x00|0x01|0x09|0x00|0x03|0x74|0x00|0x00|0x02|0x00|0x00|0xCA|0x89|
Assuming that you are using Position Control mode, then by default, the XW-430 use Profile Acceleration and Profile Velocity parameters set to ZERO. Are these parameters set at 0 for your XW-430?
And surprisingly these settings will make the actuator go “as fast as possible”. You can view this YouTube video to see how Profile Acceleration and Profile Velocity can be set to help control your XW-430 to work at the speed and smoothness that you need for your project.
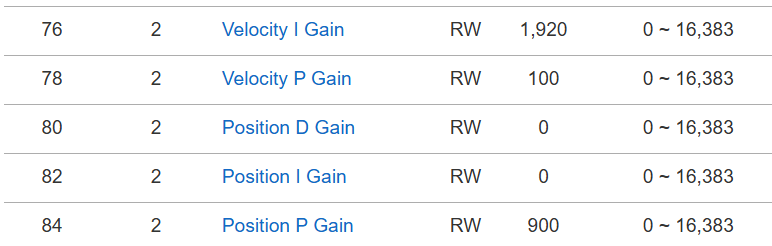
In the past, some users needed to use very slow speeds, then they even needed to manipulate the P parameter of the PID Control System