csw13_paper_16.pdf (217.0 KB)
Abstract
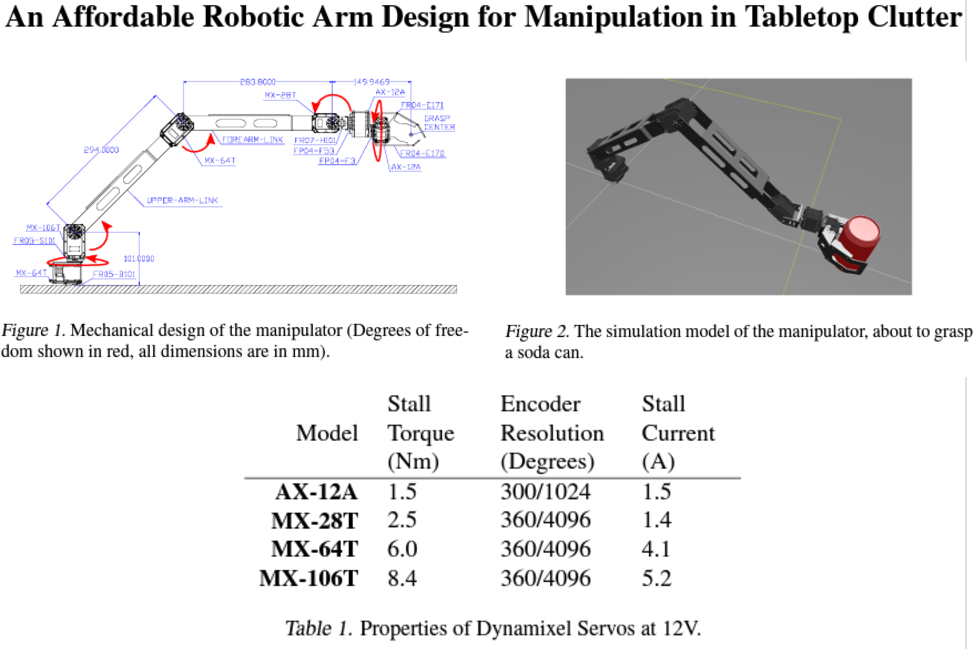
In this study, tabletop object manipulation in a cluttered environment using a robotic manipulator is considered. Our focus is on avoiding or manipulating other obstructions/objects to achive the given task. We propose an affordable robotic manipulator design with five degrees of freedom where the gripper constitutes one additional degree of freedom. The manipulator has approximately the same length as an adult human’s arm. An accurate simulation model for ROS/Gazebo along with a preliminary motion controller is also presented.
This academic paper features our DYNAMIXEL AX-12A, MX-28T, MX-64T, and MX-106T all-in-one smart actuators
All credit goes to: Ayberk ¨Ozgur and H. Levent Akın from Bogazic University, Department of Computer Engineering, Istanbul/Turkey