anintelligenthumanoidrobotimitationbyimagerecognition1400999107-with-cover-page-v2.pdf (869.3 KB)
ABSTRACT—
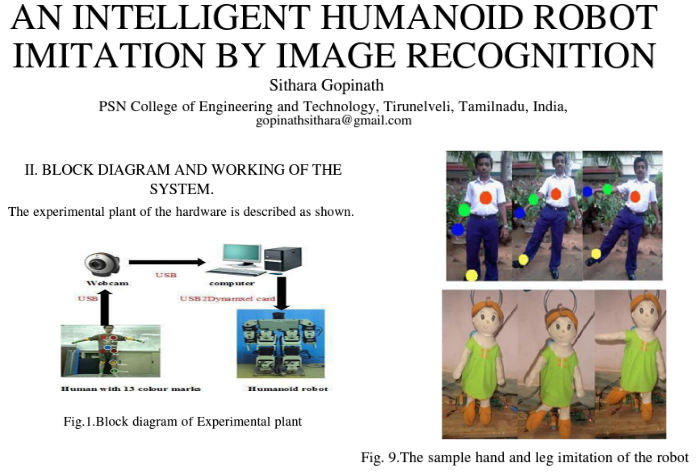
In this paper, we present a system for the imitation of human motion on a humanoid robot by means of image recognition. For achieving this imitation, three main processes are to be considered. They are human imitation data acquisition; the data modification; and the ankle angle adjustment on the supporting foot of robot. In the first process that is human imitation data acquisition first we are pasting 13 color marks on a human body at different locations. For acquiring the motion imitation we have to make use of a Logitech webcam C905 to identify these color marks and then the relative positions of the marks for each motion is recorded and calculated into the motion database. In data modification stage, these data are modified with the help of computer simulation to make sure that the zero moment point of the humanoid robot is within the stable region. At last stage that is in ankle angle adjustment stage the ankle angles are adjusted. Thus, in real time the humanoid robot can imitate almost all the human motions with stability.
This academic publication features our DYNAMIXEL AX-12 all-in-one smart actuators
All credit goes to: Sithara Gopinath from the PSN College of Engineering and Technology, Tirunelveli, Tamilnadu, India