ball balancing.pdf (981.9 KB)
Abstract
Ball Balancing is a challenging task concerning high requirement of real time property.
The Ball Balancing experiment could be seen as a benchmark experiment for the robot
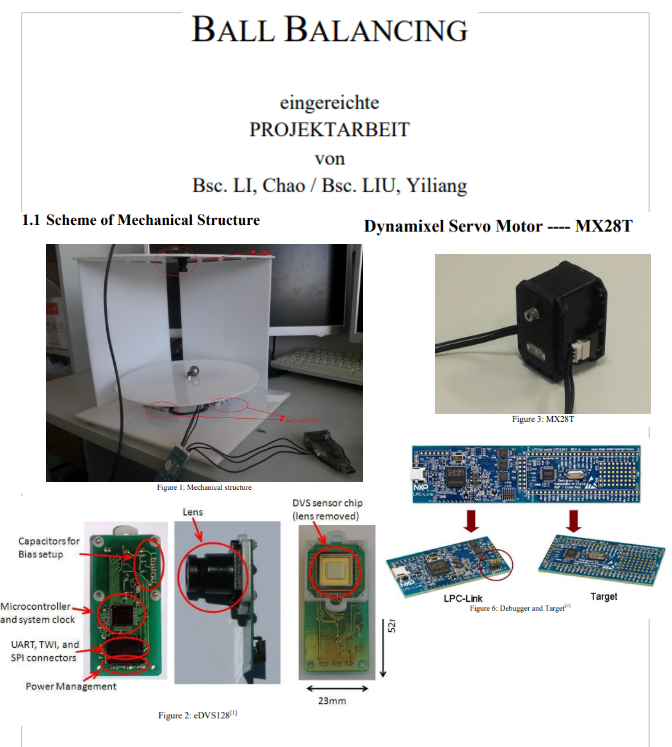
balancing which view the robot only as the center point of it. The experiment takes one eDVS to get the ball’s position and velocity and uses a PID controller / fuzzy control from a computer / LPC Microcontroller to control the two actuators in order to keep the ball stand still on the center of the plate
This academic paper features our DYNAMIXEL MX-28 all-in-one smart actuators
All credit goes to: Bsc. LI, Chao / Bsc. LIU, Yiliang
Lehrstuhl für STEUERUNGS- UND REGELUNGSTECHNIK, Technische Universität München