designandexperimentaltest.pdf (251.1 KB)
ABSTRACT:
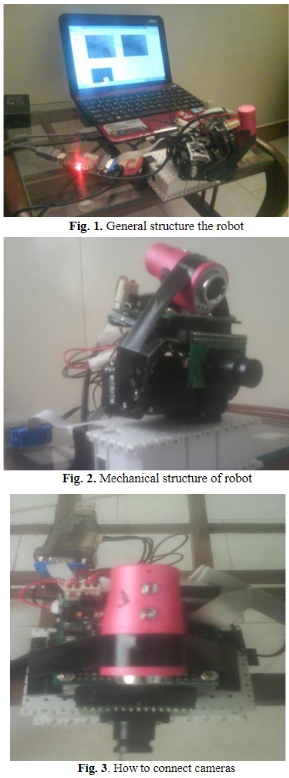
Nowadays Positioning systems have special point of view according to their applications in industries and academic research. Also a lot of algorithm and experimental systems had been proposed that each has advantages and disadvantages such as vision based systems. Less number of used cameras, dynamical high speed measurement and 3D and real time measurement are some instances that are considered in proposed measurement setup. Proposed system used CMUCAM3 powerful image processor and powerful ARM microprocessor. Experimental measurements show that system can be used as measurement unit in navigation systems that must determine 3D position of robotic systems.
KEYWORDS: Measurement, Robotic System, Camera, ARM
This academic publication features our DYNAMIXEL all-in-one smart actuators.
All credit goes to Anna Bavarsad and Mohsen Irani Rahagi from the Islamic Azad University of Kashan Branch, Kashan, Iran