Design of a Modular Series Elastic Upgrade to a Robotics Actuator.pdf (1.4 MB)
Abstract
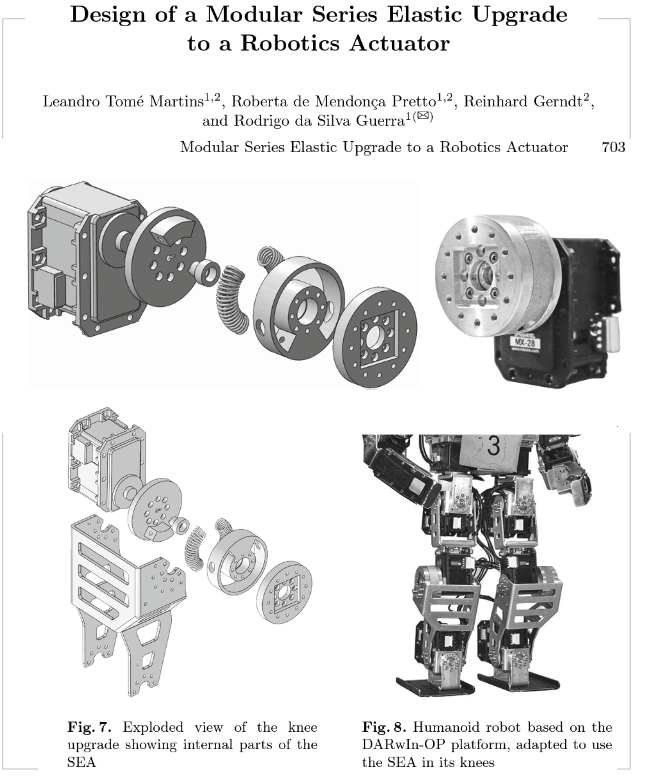
In this article we present a compact and modular device designed to allow a conventional stiff servo actuator to be easily upgraded into a series elastic actuator (SEA). This is a low cost, open source and open hardware solution including mechanical CAD drawings, circuit schematics, board designs and firmware code. We present a complete overview of the project as well as a case study where we show the device being employed as an upgrade to add compliance to the knee joints of an existing humanoid robot design.
Keywords: Series elastic actuator · Passive compliance
This academic paper features our DYNAMIXEL MX-28 all-in-one smart actuators
All credit goes to: Leandro Tome Martins, Roberta de Mendonca Pretto, Reinhard Gerndt, and Rodrigo da Silva Guerra