ies2014-commuart.pdf (221.7 KB)
Abstract
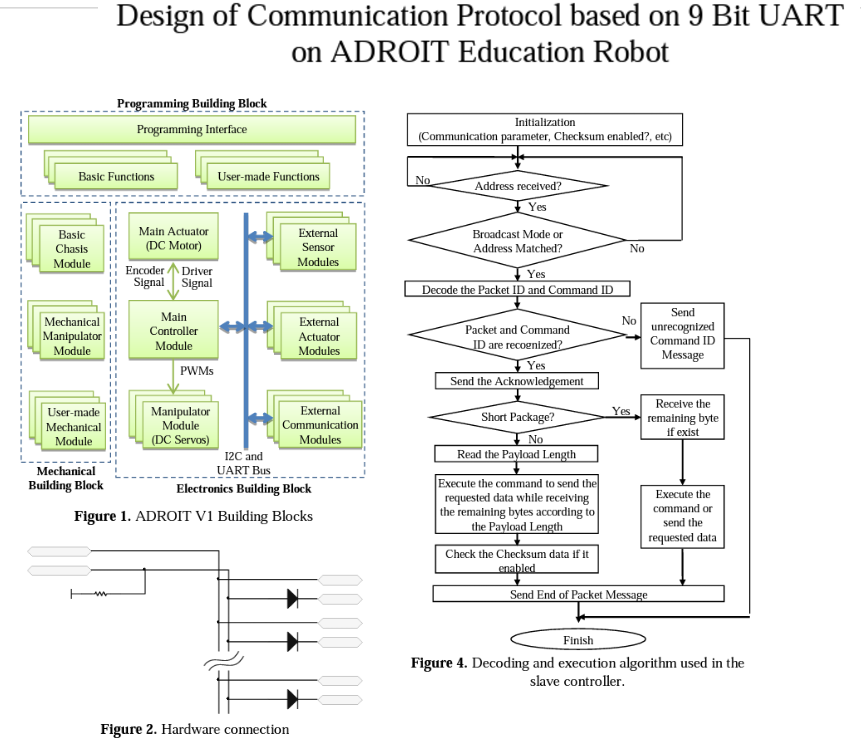
As modularity became essential in educational robot, communication to be an important part in connecting electronics modules in the robot itself. To reduce overall cost, a low-cost microcontrollers have been used as the controller on each of the robot modules. Most of lowcost microcontrollers have been equipped with UART as the communication interface. But UART interface standard only describes the physical layer of the communication. The design of the higher level communication layer will be up to the user implementation. Beside that, UART interface basically just designed for poin-to-point communication. So for multidrop communication, a special communication protocol is needed. This paper proposes a simple and easy to implement full-duplex data link and network layer protocol stacks based on single-master and multislaves configuration on multidrop communication bus. Using this design, up-to 64 robot modules can be deployed on the proposed communication line.
Keywords: Education robot, communication protocol, UART, data-link layer.
This academic paper features our DYNAMIXEL all-in-one smart actuators
All credit goes to: Eko Henfri Binufroho, Endah Suryawati Ningrum, Adnan Rachmad Anom Besari from the Mechanical and Energy Engineering Department, Computer and Informatics Engineering Department Electronic, Engineering Politechnics Institute of Surabaya