Klinke.pdf (3.4 MB)
I Performance: High update rates
I Extendability: Easy to add new sensors / actuators
I Scalability: Scale well in multi-bus setups
I Easy integration: Drop-in replacement for existing controllers
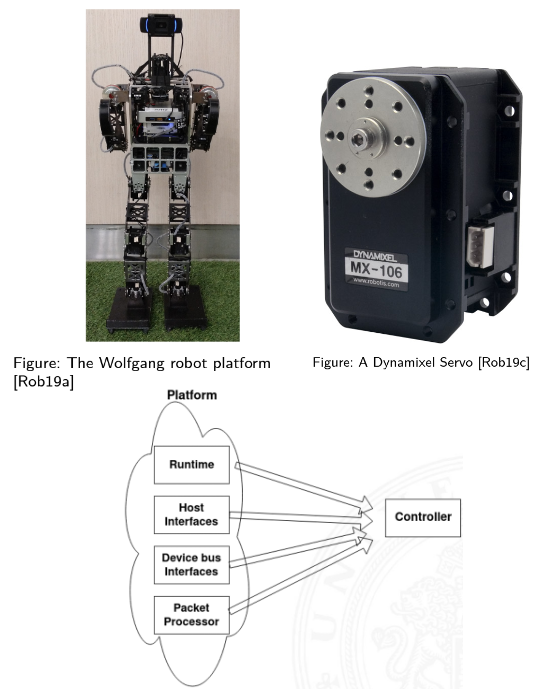
I Dynamixel support: First class Dynamixel servos support
This academic publication features our DYNAMIXEL MX-106 all-in-one smart actuators.
All credit goes to Tobias Alexander Klinke from the University of Hamburg (Faculty of Mathematics, Informatics, and Natural Sciences, Department of Informatics)