Abstract
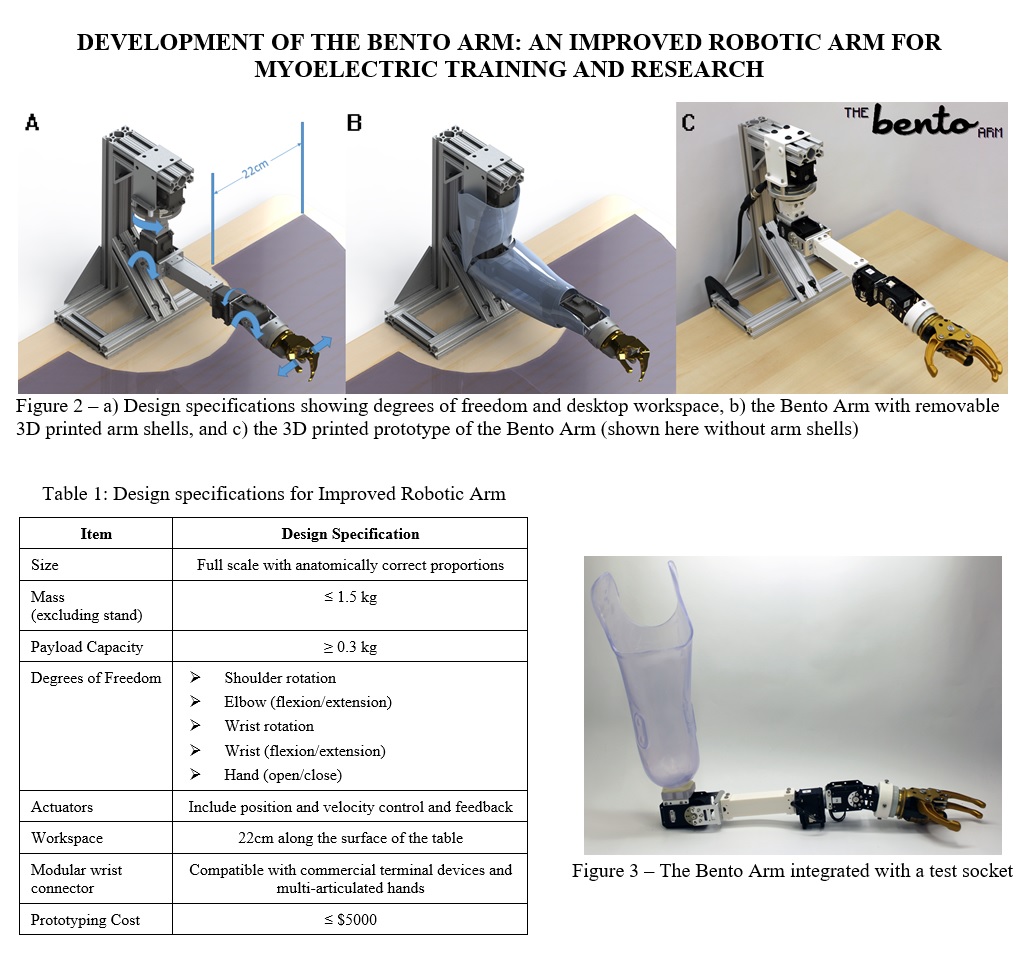
The Myoelectric Training Tool (MTT) was developed to assess and train upper-limb prosthesis users in how to use their electromyography (EMG) signals prior to being fit with their myoelectric prostheses. The original MTT included a desk mounted off-the-shelf robotic arm, electromyography (EMG) acquisition system, EMG controller, and graphical user interface. Previously, the MTT was used in several studies related to investigating clinical training protocols, novel machine learning controllers, and sensory feedback systems. During these studies certain limitations were discovered in the MTT’s off-the-shelf robotic arm. To overcome these issues, an improved robotic arm, the Bento Arm, was designed specifically for myoelectric training and research applications. The Bento Arm includes 5 degrees of freedom similar to those available in commercial prostheses and was designed to be 1:1 scale with anatomical proportions. The MX-series of Dynamixel actuators were selected to allow for continuous payloads of up to 0.3 kg and include integrated position and velocity joint feedback and control. Anthropomorphic arm shells were designed using 3D scanning technology to improve the aesthetics of the arm and allow it to be more easily visualized as an arm or prosthesis. The arm can be desk mounted or interfaced to a transhumeral socket and worn by persons with limb difference. Future work will focus on machining the final parts out of aluminium, creating an array of custom grippers to go along with the arm, designing a wearable controller, and improving the software interfaces.
Keywords: robotic arm; powered prosthesis; myoelectric; electromyography; EMG; amputee; training; rehabilitation
Featured Actuators: Dynamixel MX-106T, MX-64T, MX-28T
Citation:
M.R. Dawson, C. Sherstan, J.P. Carey, J.S. Hebert, P.M. Pilarski, “Development of the Bento Arm: An Improved Robotic Arm for Myoelectric Training and Research,” Proc. of MEC’14: Myoelectric Controls Symposium, Fredericton, New Brunswick, August 18-22, 2014, pp. 60-64. (PDF)
Overview Website: Overview – BLINCdev
Open Source Repository: GitHub - BLINCdev/Bento-Arm-Hardware: The 3d files and documentation for building the Bento Arm