donaxi.pdf (515.2 KB)
Abstract
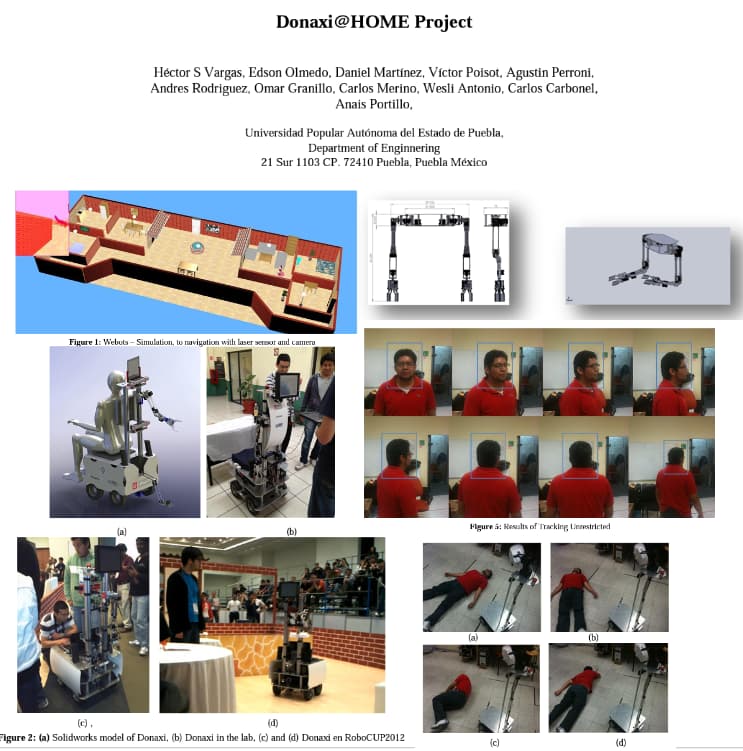
Donaxi has become a new prototype to improve their different capacities in the area of service robotics. This paper describes the functional architecture design and the different modules that integrate it of the service robot Donaxi of UPAEP. Novel results are presented here in the area of face recognition; we propose the “Hybrid Algorithm to Human-Face Detection and Tracking Unrestricted” and “Identification of People on the Floor Due to a Fall or Other Accident”. The robot Donaxi is used as a vehicle for research in control of movement and human-robot interaction. The at Home League of RoboCup provides an ideal tested for such aspects of dynamic in motion indoor, skills to manipulate objects, aptitudes to intergesticulate with the persons in natural language and more. A modular software architecture as well as further technologies have been developed for efficient and effective implementation and test of modules for sensing, planning, behavior, and actions of service robots.
Keywords: Hybrid Algorithm, Human-Face Detection, Tracking Unrestricted, Identification of People, Fall, dynamic and kinematic.
This academic paper features our DYNAMIXEL all-in-one smart actuators
All credit goes to: Héctor S Vargas, Edson Olmedo, Daniel Martínez, Víctor Poisot, Agustin Perroni, Andres Rodriguez, Omar Granillo, Carlos Merino, Wesli Antonio, Carlos Carbonel, Anais Portillo from the Universidad Popular Autónoma del Estado de Puebla, Department of Enginnering 21 Sur 1103 CP. 72410 Puebla, Puebla México