RSS_2009_WS_MobManip_Dynamaid.pdf (930.7 KB)
Abstract—
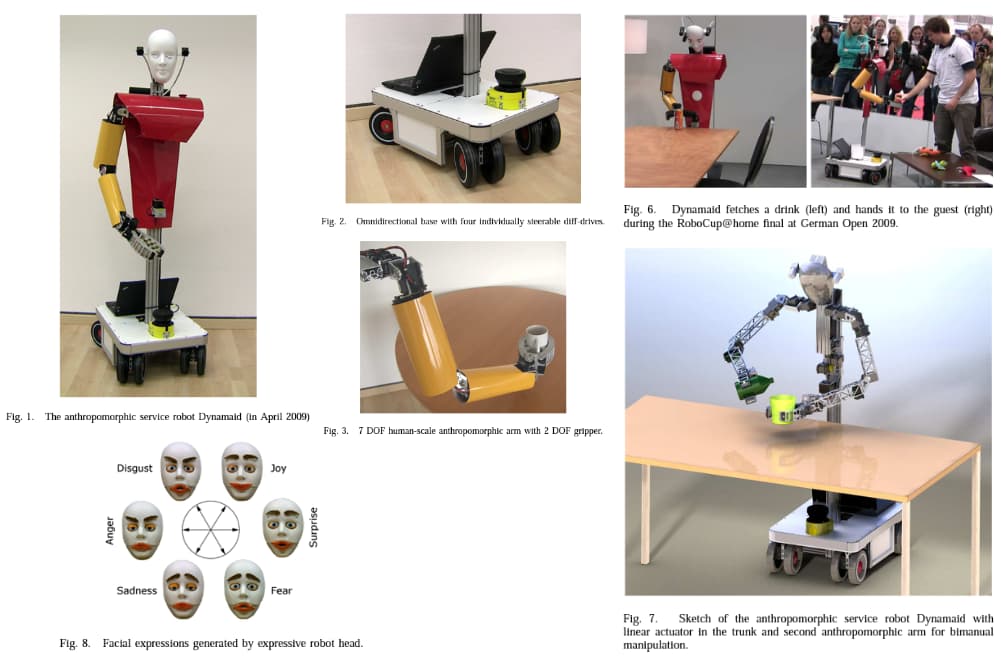
Domestic service tasks require three main skills from autonomous robots: robust navigation, mobile manipulation, and intuitive communication with the users. Most robot platforms, however, support only one or two of the above skills. In this paper we present Dynamaid, a new robot platform for research on domestic service applications. For robust navigation, Dynamaid has a base with four individually steerable differential wheel pairs, which allow omnidirectional motion. For mobile manipulation, Dynamaid is additionally equipped with an anthropomorphic arm and a gripper. For intuitive multimodal communication, the robot has a microphone, stereo cameras, and a movable head. It can perceive persons in its environment, recognize and synthesize speech. We developed software for the tests of the RoboCup@Home competitions, where robots must autonomously perform useful tasks in a home environment. In April 2009, Dynamaid took part in the RoboCup German Open competition at the Hannover Messe industrial trade fair. Together with our communication robot Robotinho, she performed very well.
This academic publication features our DYNAMIXEL EX-106, RX-28, RX-64 all-in-one smart actuators
All credit goes to: Jorg Stuckler, Kathrin Grave, Jochen Klaß, Sebastian Muszynski, Michael Schreiber, Oliver Tischler, Ralf Waldukat, and Sven Behnke of the Computer Science Institute VI, Autonomous Intelligent Systems University of Bonn, Germany