UPDATE: Feb. 4 2023.
Today, I took a second look at this project and figured out my previous errors which were to trust the Functions ping() and scan() of the Dynamixel2Arduino library ![]() .
.
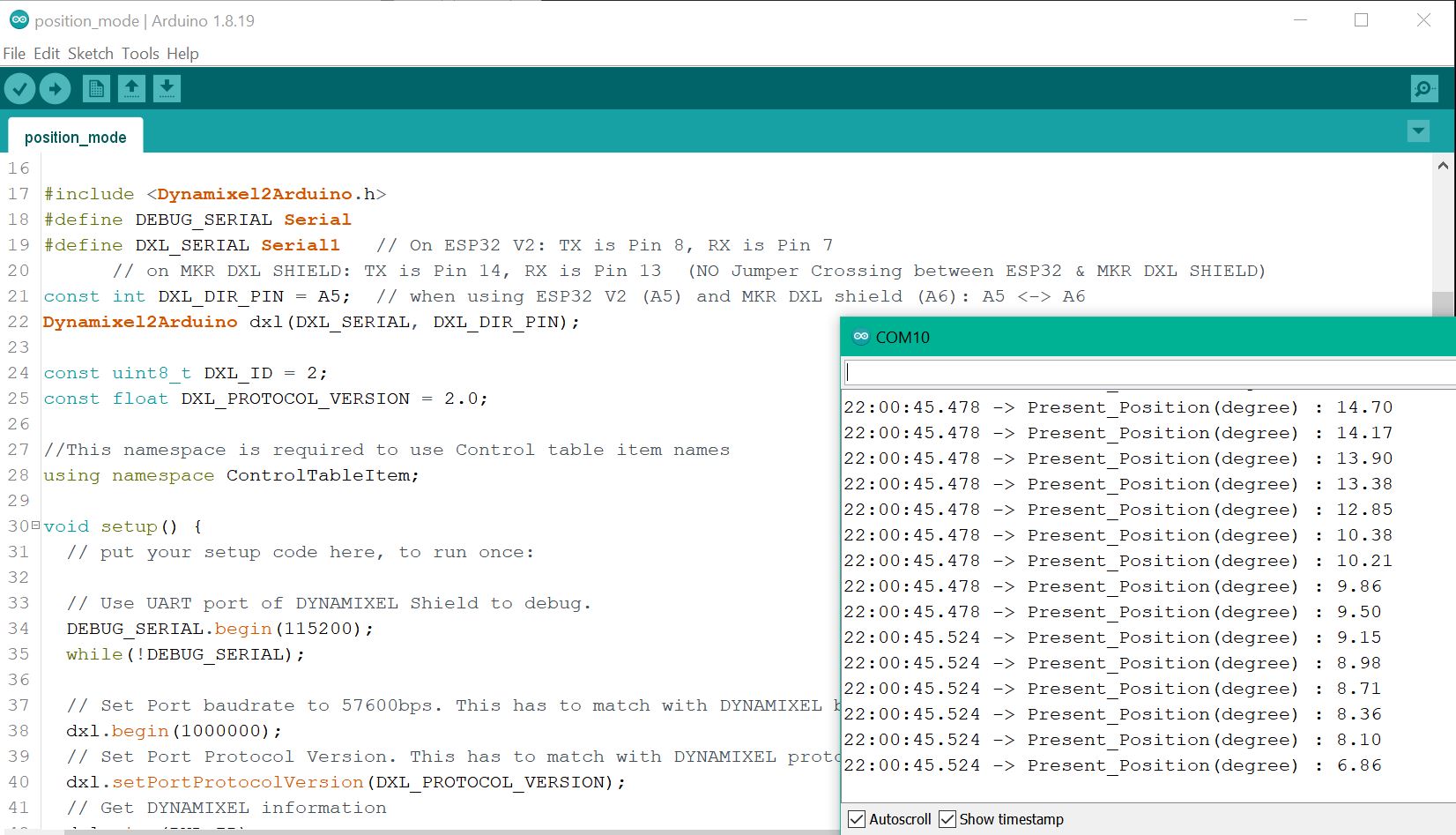
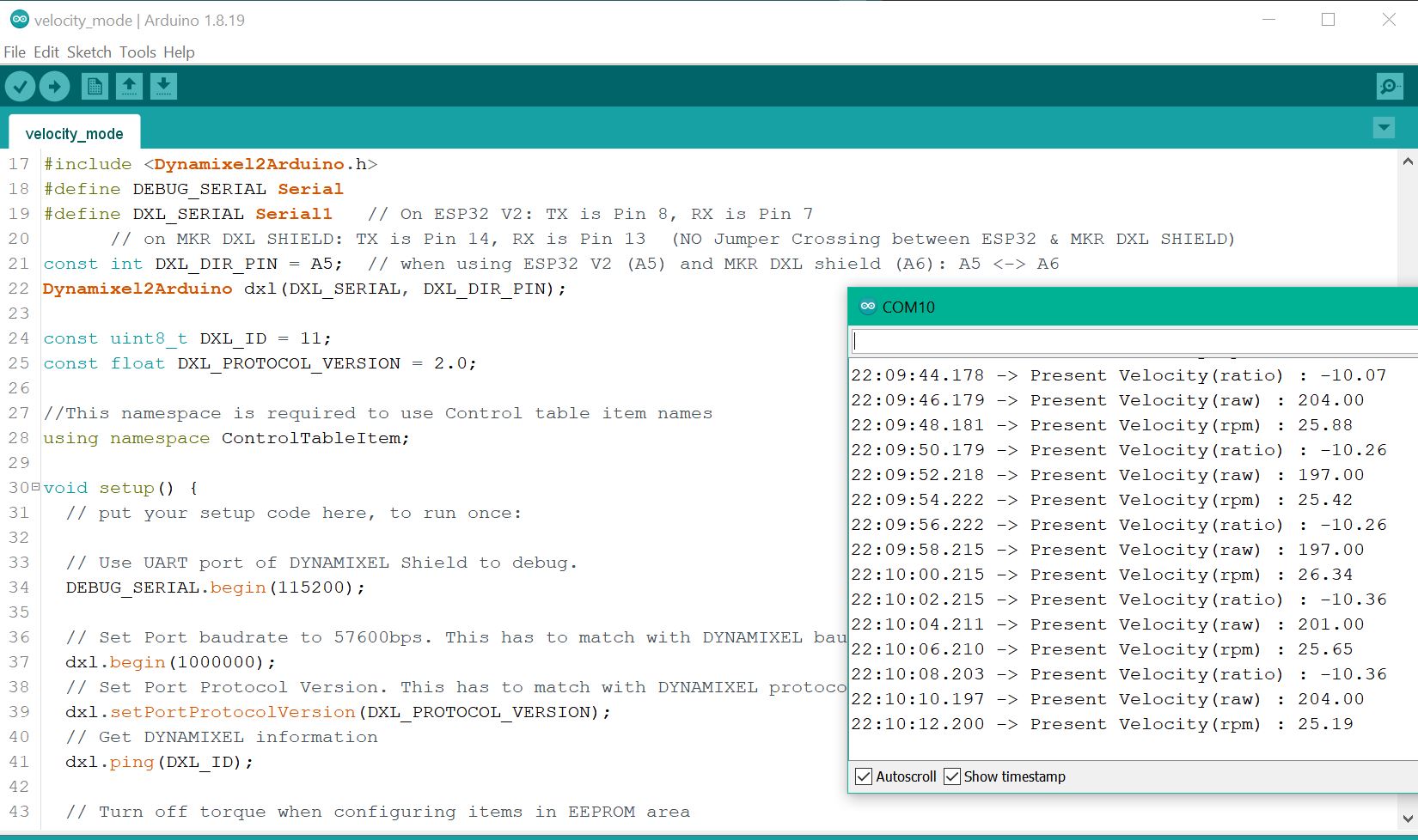
First, I tried the sample sketches position_mode and position_velocity for this setup and they worked fine for me - see screen captures below:
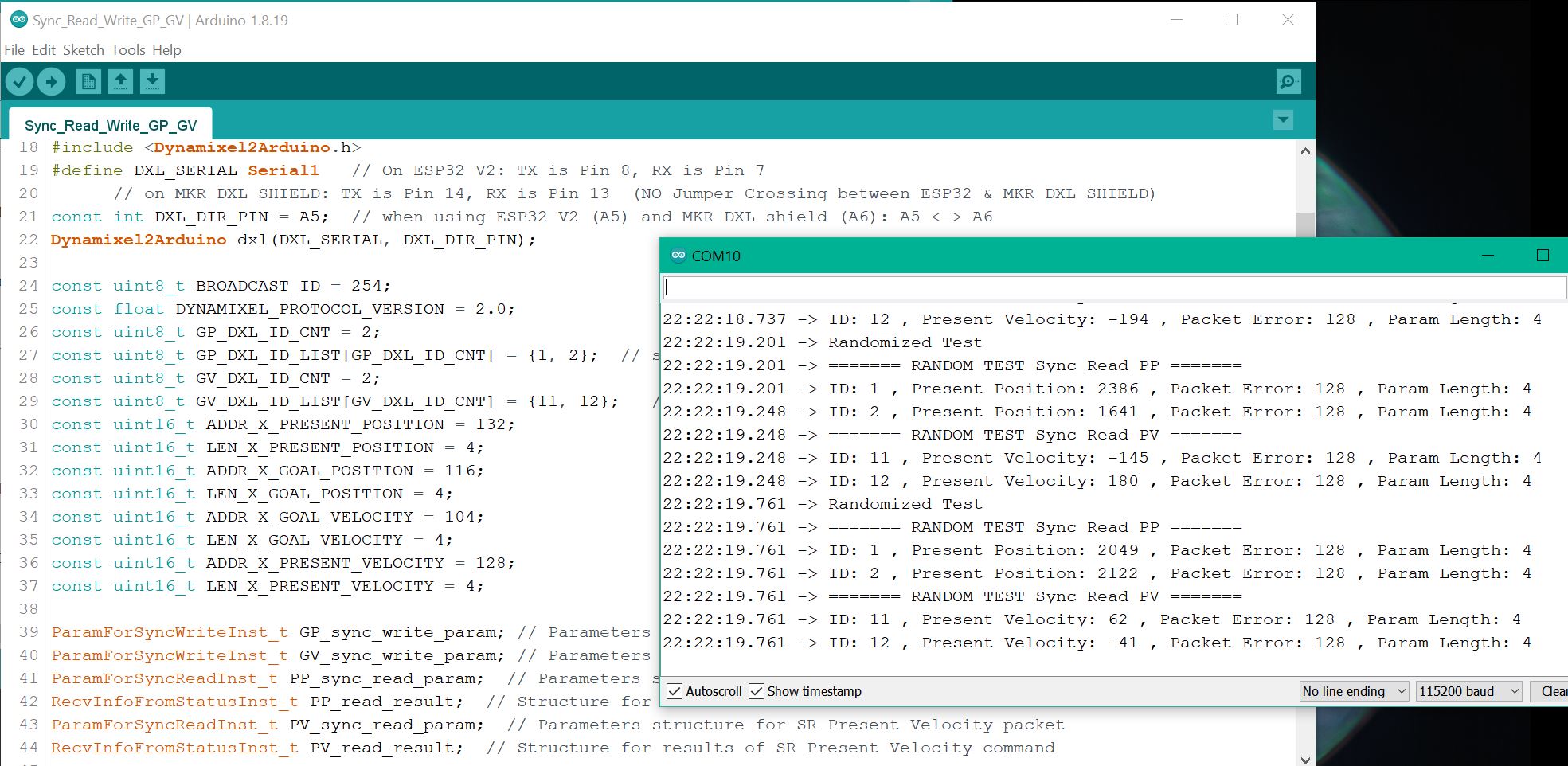
Next, I went back to my SyncReadWrite sketch, and found that I forgot to initialize my Serial Port properly. OOPS! Once that was fixed, my SyncReadWrite sketch WORKED FINE PHYSICALLY on my DXLs, however I kept getting PACKET ERROR 128 - see screen capture below:
If @willson sees this post, may be he can help us understand what is going on.
Thus my conclusions at this time are:
-
It is OK to use Adafruit Feather ESP32 V.2 with the MKR DXL Shield with the proper jumper wires used as described in my Post 1.
-
The Dynamixel2Arduino Library seemed to work with this setup, but do not use/trust Functions ping() and scan().
-
Although the DXLs seemed to respond properly to Goal Velocity and Goal Position commands (regular mode or in sync read/write mode). They always reported Packet Error 128, so the user must exercise vigilance!