ExoKit: A Toolkit for Rapid Prototyping of Interactions for Arm-based Exoskeletons
Abstract
Exoskeletons open up a unique interaction space that seamlessly
integrates users’ body movements with robotic actuation. Despite
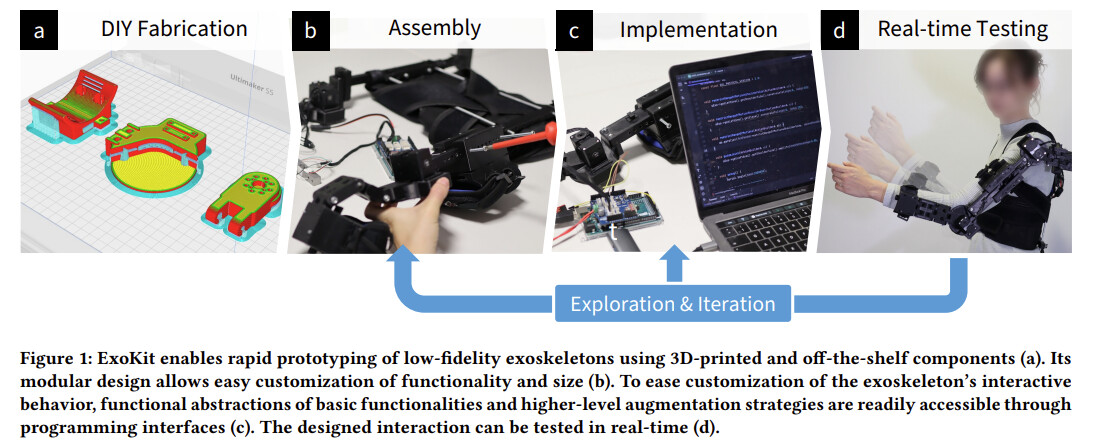
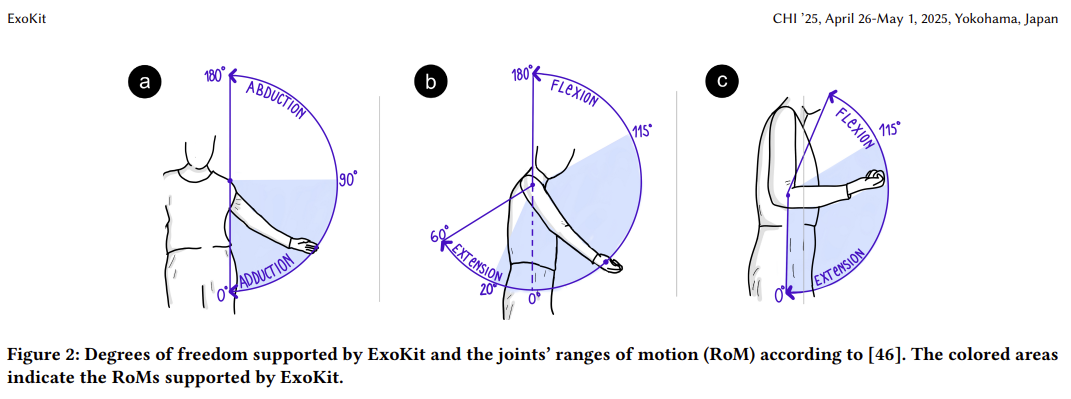
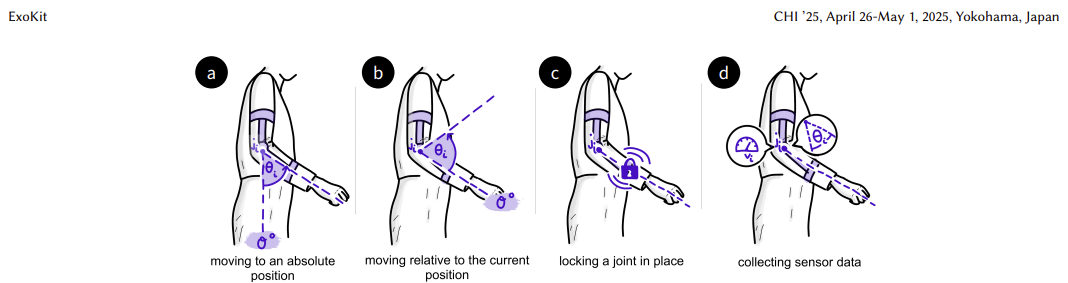
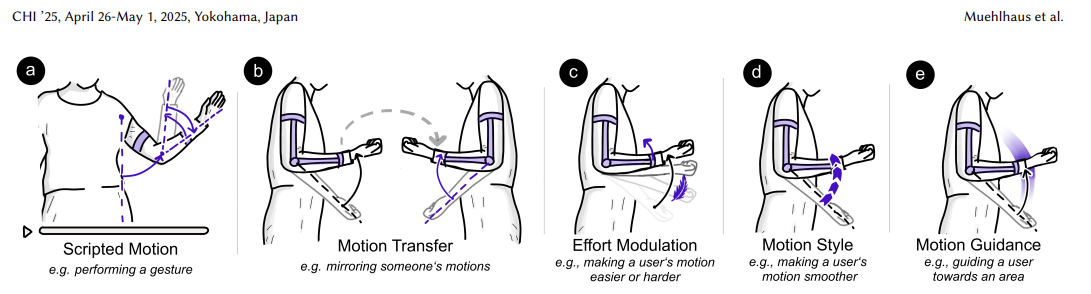
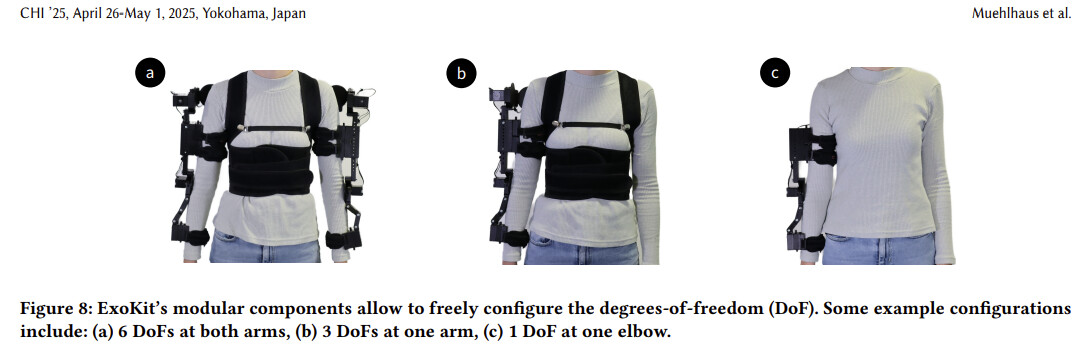
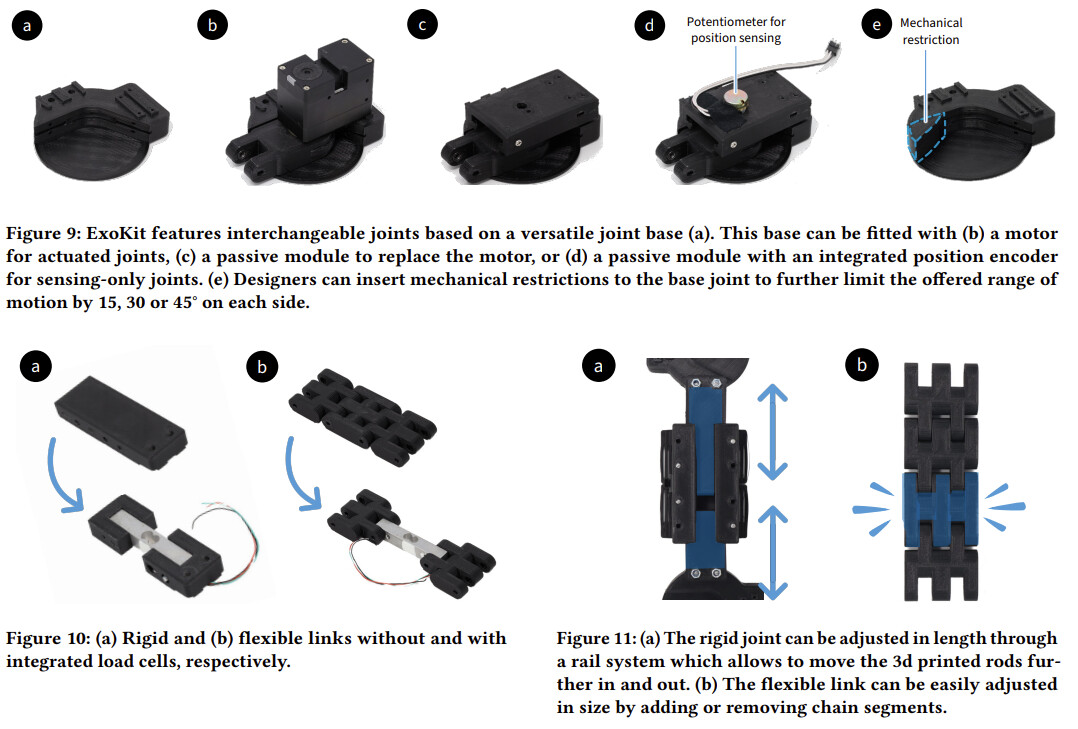
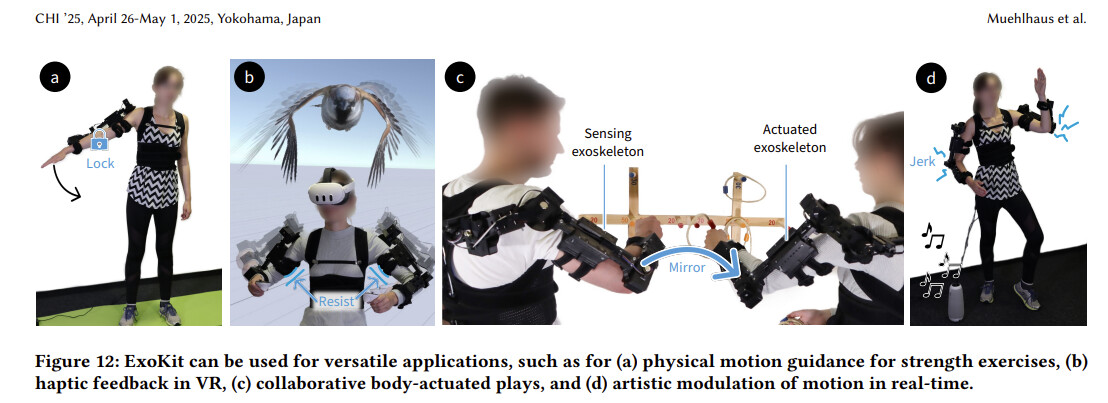
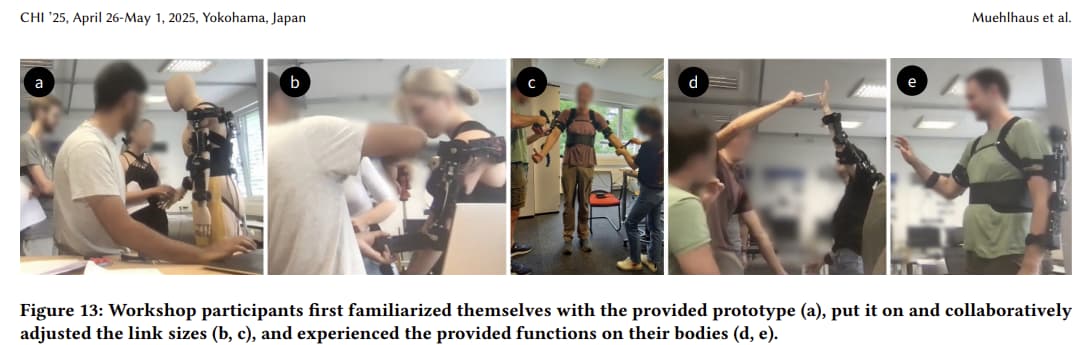
its potential, human-exoskeleton interaction remains an underexplored area in HCI, largely due to the lack of accessible prototyping tools that enable designers to easily develop exoskeleton designs and customized interactive behaviors. We present ExoKit, a do-it yourself toolkit for rapid prototyping of low-fidelity, functional exoskeletons targeted at novice roboticists. ExoKit includes modular hardware components for sensing and actuating shoulder and elbow joints, which are easy to fabricate and (re)configure for customized functionality and wearability. To simplify the programming of interactive behaviors, we propose functional abstractions that encapsulate high-level human-exoskeleton interactions. These can be readily accessed either through ExoKit’s command-line or graphical user interface, a Processing library, or microcontroller firmware, each targeted at different experience levels. Findings from implemented application cases and two usage studies demonstrate the versatility and accessibility of ExoKit for early-stage interaction design.
Powered by DYNAMIXEL
Full Research Paper: https://arxiv.org/pdf/2502.12747
All Credits Go To: Marie Muehlhaus, Alexander Liggesmeyer, Jürgen Steimle and Saarland University, Saarland in Germany
ROBOTIS US e-Shop: www.robotis.us
DYNAMIXEL LinkedIn DYNAMIXEL | LinkedIn