frequency.pdf (8.8 MB)
Abstract—
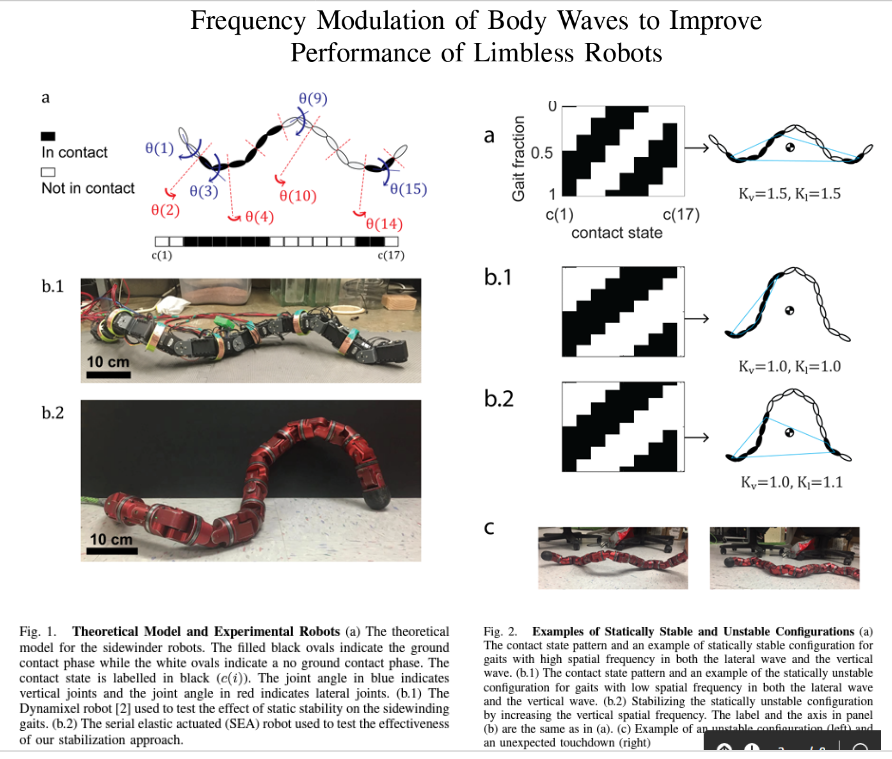
Sidewinder rattlesnakes generate movement through coordinated lateral and vertical traveling waves of body curvature. Previous biological and robotic studies have demonstrated that proper control and coordination of these two waves enables robust and versatile locomotion in complex environments. However, the propagation of the vertical wave, which sets the body environment contact state, can affect static stability and lead to undesirable locomotion behaviors, especially for movement at low speeds. Here, we propose to stabilize gaits by modulations of the spatial frequency of the vertical wave, which can be used to tune the number of distinct body-environment contact patches (while maintaining a constant overall contact area). These modulations act to stabilize configurations that were previously statically unstable and therefore, by eliminating dynamic effects such as undesired turning, broaden the range of movements and behaviors accessible to limbless locomotors at a variety of speeds. Specifically, our approach identifies, for a given lateral wave, the spatial frequency of the vertical wave that statically stabilizes the locomotor and then uses geometric mechanics tools to identify the coordination (i.e., the phase shift) between the vertical and lateral waves that produces a desired motion. We demonstrate the effectiveness of our technique in robot experiments.
This academic paper features our DYNAMIXEL AX-12A all-in-one smart actuators
All credit goes to: Baxi Chong, Tianyu Wang, Jennifer M. Rieser, Abdul Kaba, Howie Choset and Daniel I. Goldman from the Georgia Institute of Technology, Carnegie Mellon University, and Morehouse College