FUmanoid_HL-Kid_RC2009_TDP.pdf (192.9 KB)
Abstract
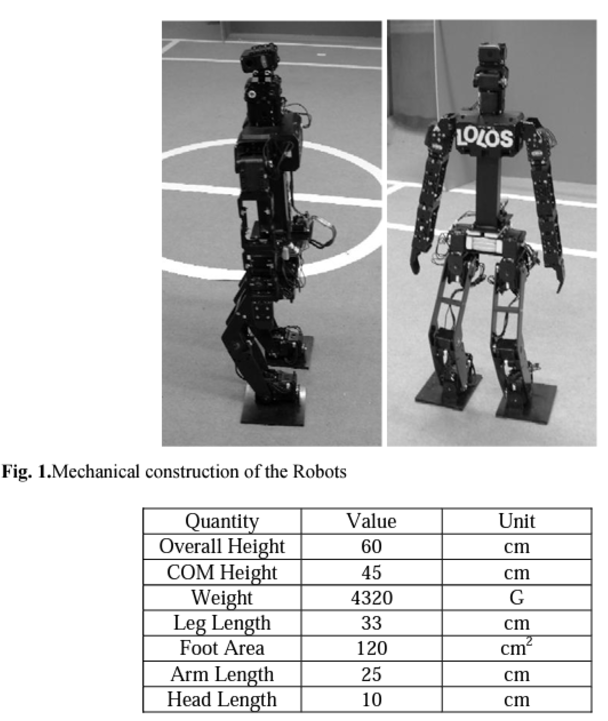
This document describes hardware and software of the robots developed by the “FUmanoid” Team for the RoboCup competitions to be held in Graz, Austria 2009. The robot has 22 actuated degrees of freedom based on Dynamixel RX28, and RX64 servos. Central Processing, including Machine vision, Planning and control is performed using a Gumstix Verdex 6LP which is an ARM based 600MHz platform. Planning algorithms are organized in a new structure called Concurrent Scenario based Planning (CSBP). This paper explains the software and hardware used for the robot as well as control and stabilization methods developed by our team.
This academic publication features our DYNAMIXEL AX-28, RX-28 and RX-64 all-in-one smart actuators.
All credit goes to: Hamid Reza Moballegh, Gretta Hohl, Tim Landgraf, Bennet Fischer, Tobias Langner, Torsten Fassbender, Stefan Otte, Kai Stoll, Alexej Tuchscherer, Daniel Steig, Steffen Heinrich, Sebastian Mielke, Daniel Seifert, Mariusz Kukulski, Björn Kahlert, and Raúl Rojas from Institut für Informatik, Arbeitsgruppe Künstliche Intelligenz, Freie Universität Berlin, Germany