DYNAMIXEL Servo:
- 2XL430-W250
- XM430-W350
DYNAMIXEL Controller:
- DYNAMIXEL Starter Set
Software Interface:
Python and Matlab.
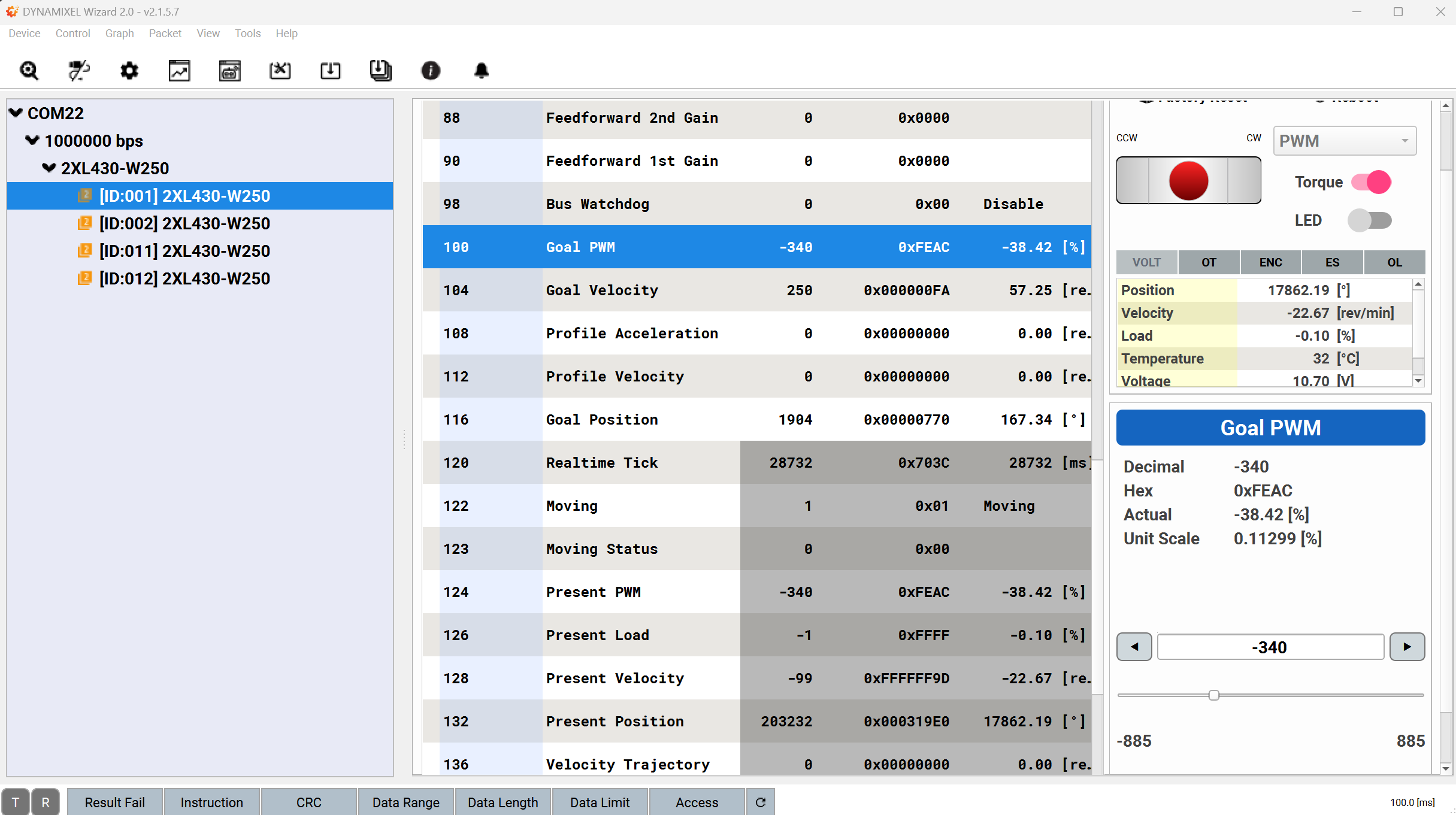
Issue:
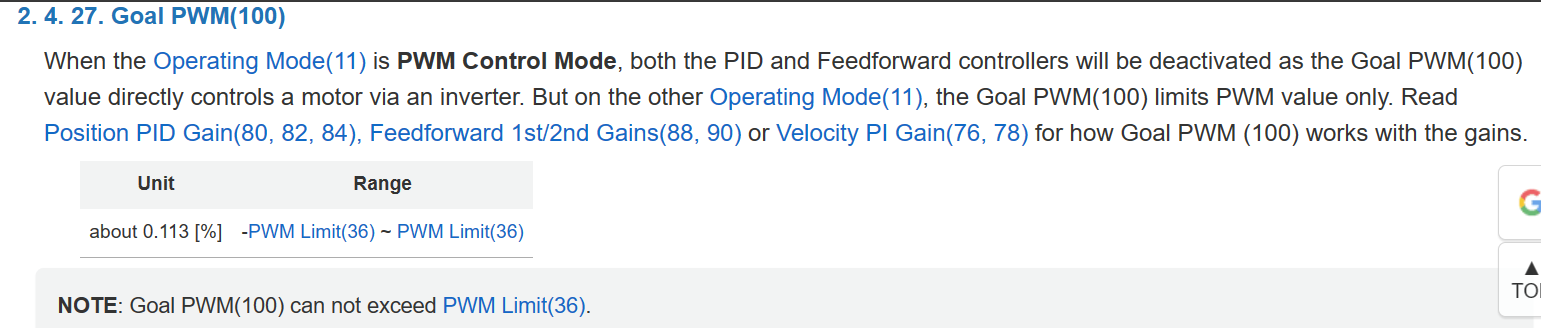
I want to use the PWM mode of the Dynamixel motors. What I want to do are two things:
- Send a direct PWM to the motor using torque mode.
- Make the motor rotate from left to right, meaning it can move in the opposite direction.
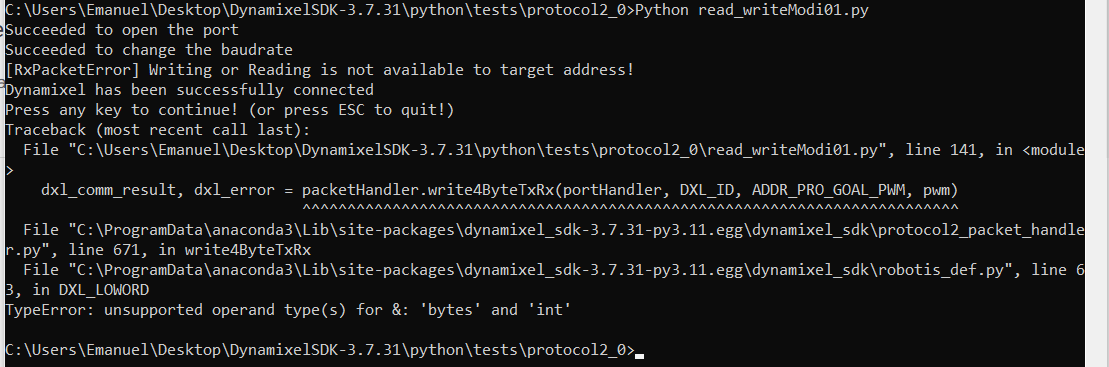
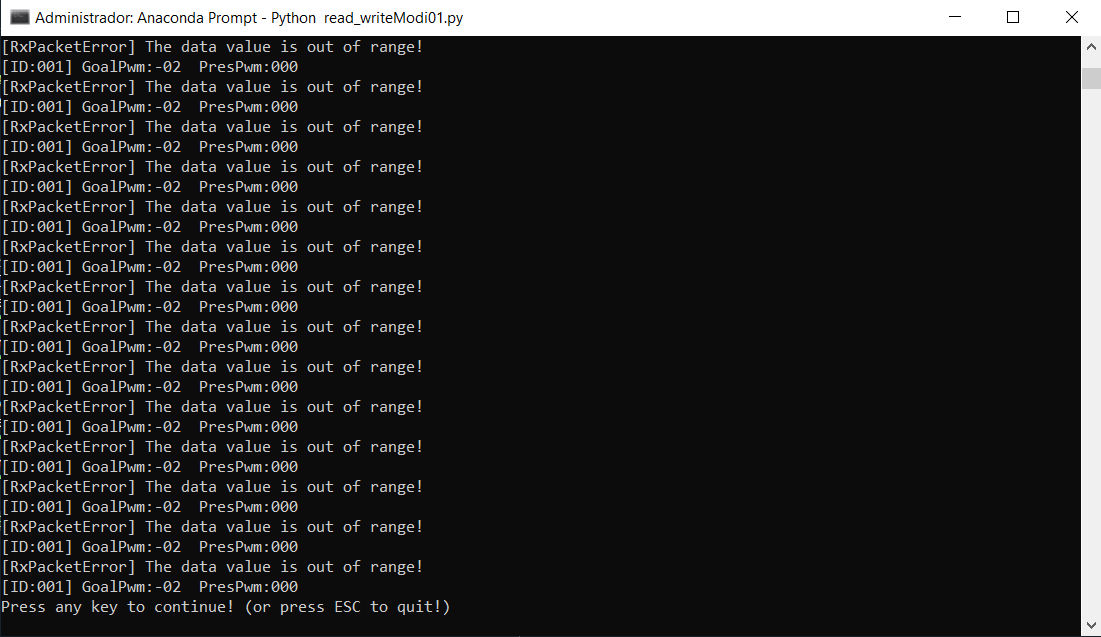
I have modified the read_write.py file, but I get the following problems:
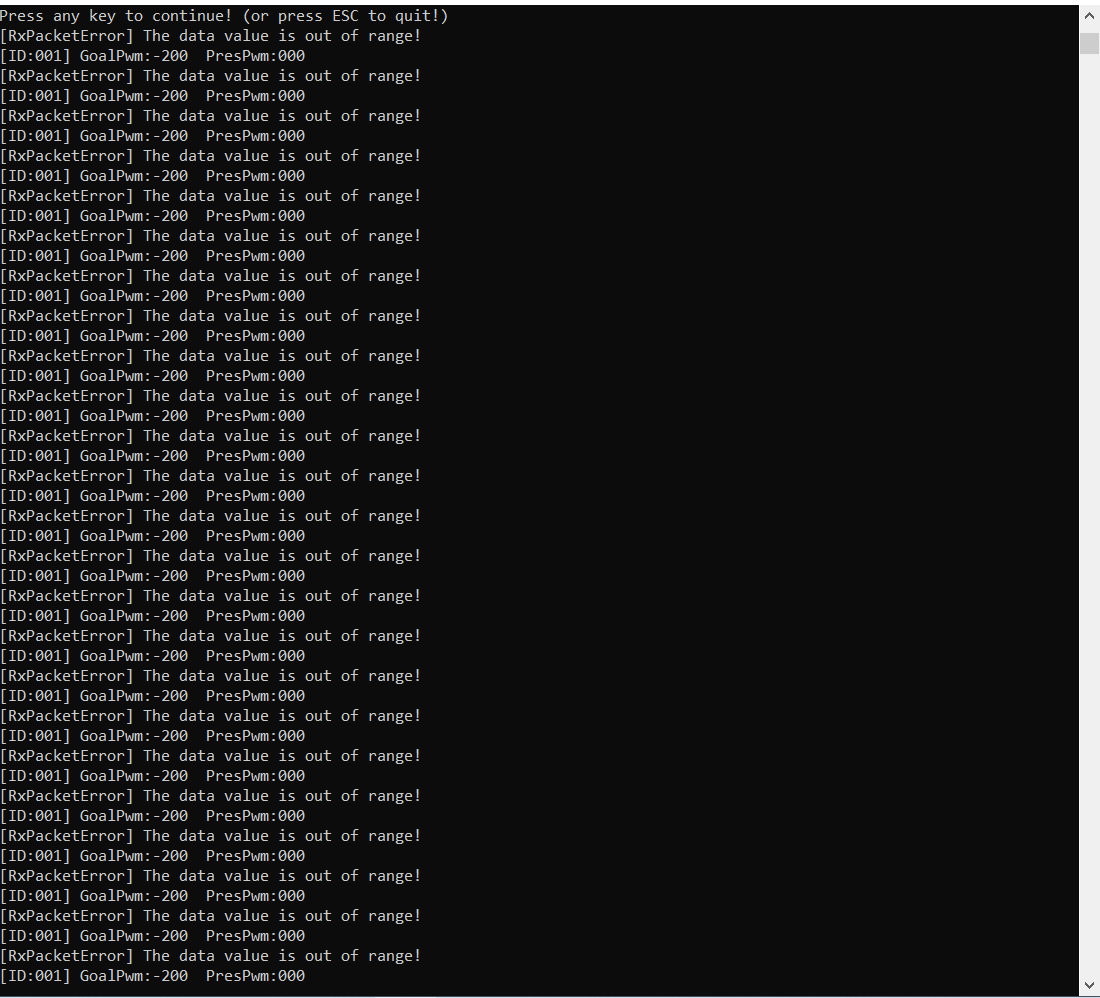
– When I send a negative signal it gives the following:
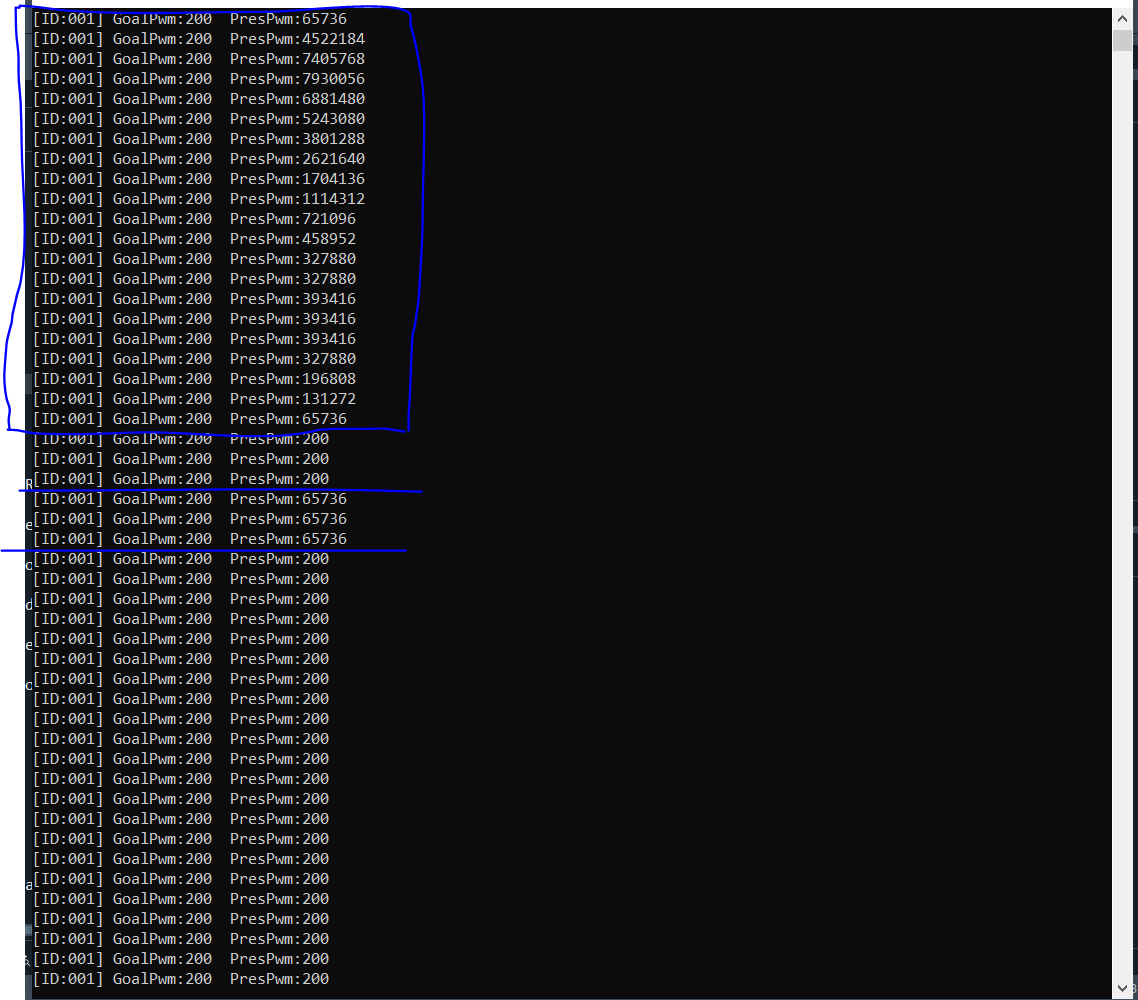
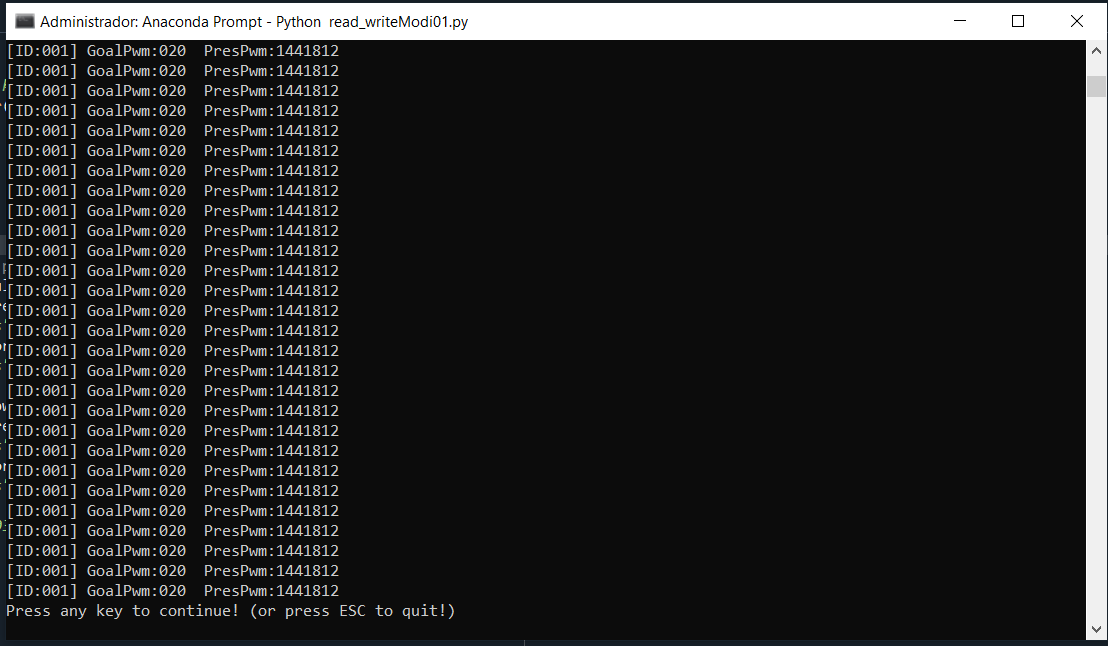
– When I send a positive signal it gives this:
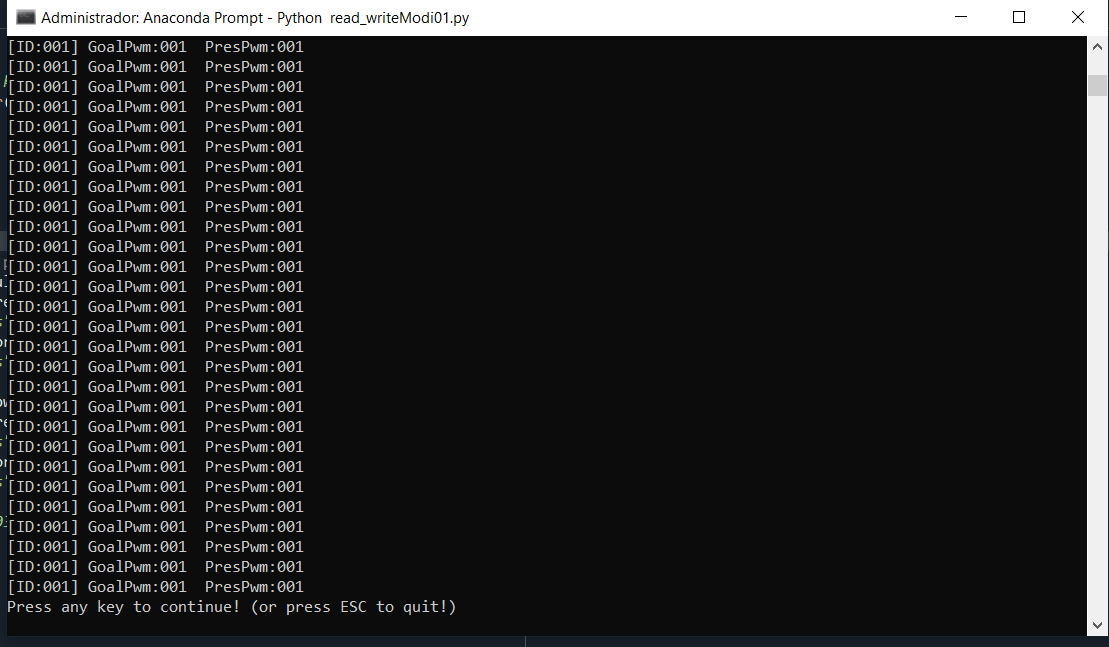
– Only when I send it 1 do I get 1 in the current pwm:
This is the code I’m using:
from dynamixel_sdk import * # Uses Dynamixel SDK library
#Control table address
ADDR_OPERATING_MODE = 11 # Control table address is different in Dynamixel model
ADDR_PRO_TORQUE_ENABLE = 64 # Control table address is different in Dynamixel model
ADDR_PRO_GOAL_PWM = 100
ADDR_PRO_PRESENT_PWM = 124
# Protocol version
PROTOCOL_VERSION = 2.0 # See which protocol version is used in the Dynamixel
# Default setting
DXL_ID = 1 # Dynamixel ID : 1
BAUDRATE = 57600 # Dynamixel default baudrate : 57600
DEVICENAME = 'COM12' #'/dev/ttyUSB0' # Check which port is being used on your controller
# ex) Windows: "COM1" Linux: "/dev/ttyUSB0" Mac: "/dev/tty.usbserial-*"
TORQUE_ENABLE = 1 # Value for enabling the torque
TORQUE_DISABLE = 0 # Value for disabling the torque
PWM_CONTROL_MODE = 16 # Value for extended position control mode (operating mode)
index = 0
portHandler = PortHandler(DEVICENAME)
packetHandler = PacketHandler(PROTOCOL_VERSION)
# Open port
if portHandler.openPort():
print("Succeeded to open the port")
else:
print("Failed to open the port")
print("Press any key to terminate...")
getch()
quit()
# Set port baudrate
if portHandler.setBaudRate(BAUDRATE):
print("Succeeded to change the baudrate")
else:
print("Failed to change the baudrate")
print("Press any key to terminate...")
getch()
quit()
# Set operating mode to extended position control mode
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_OPERATING_MODE, PWM_CONTROL_MODE)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
else:
print("Operating mode changed to extended position control mode.")
# Enable Dynamixel Torque
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_PRO_TORQUE_ENABLE, TORQUE_ENABLE)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
else:
print("Dynamixel has been successfully connected")
i = 0
while 1:
print("Press any key to continue! (or press ESC to quit!)")
if getch() == chr(0x1b):
break
while 1:
i = i+1
pwm = 0.113
# Write goal position
dxl_comm_result, dxl_error = packetHandler.write4ByteTxRx(portHandler, DXL_ID, ADDR_PRO_GOAL_PWM, pwm)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
dxl_present_pwm, dxl_comm_result, dxl_error = packetHandler.read4ByteTxRx(portHandler, DXL_ID, ADDR_PRO_PRESENT_PWM)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
print("[ID:%03d] GoalPwm:%03d PresPwm:%03d" % (DXL_ID, pwm, dxl_present_pwm))
if i ==50:
i=0
break
# Disable Dynamixel Torque
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_PRO_TORQUE_ENABLE, TORQUE_DISABLE)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
# Close port
portHandler.closePort()