Issue:
Hello,
I am currently using the XM430-W350-T. As far as I know, the Dynamixel Wizard 2.0 and Dynamixel SDK allow access to various information such as Present Current, Present Position, etc.
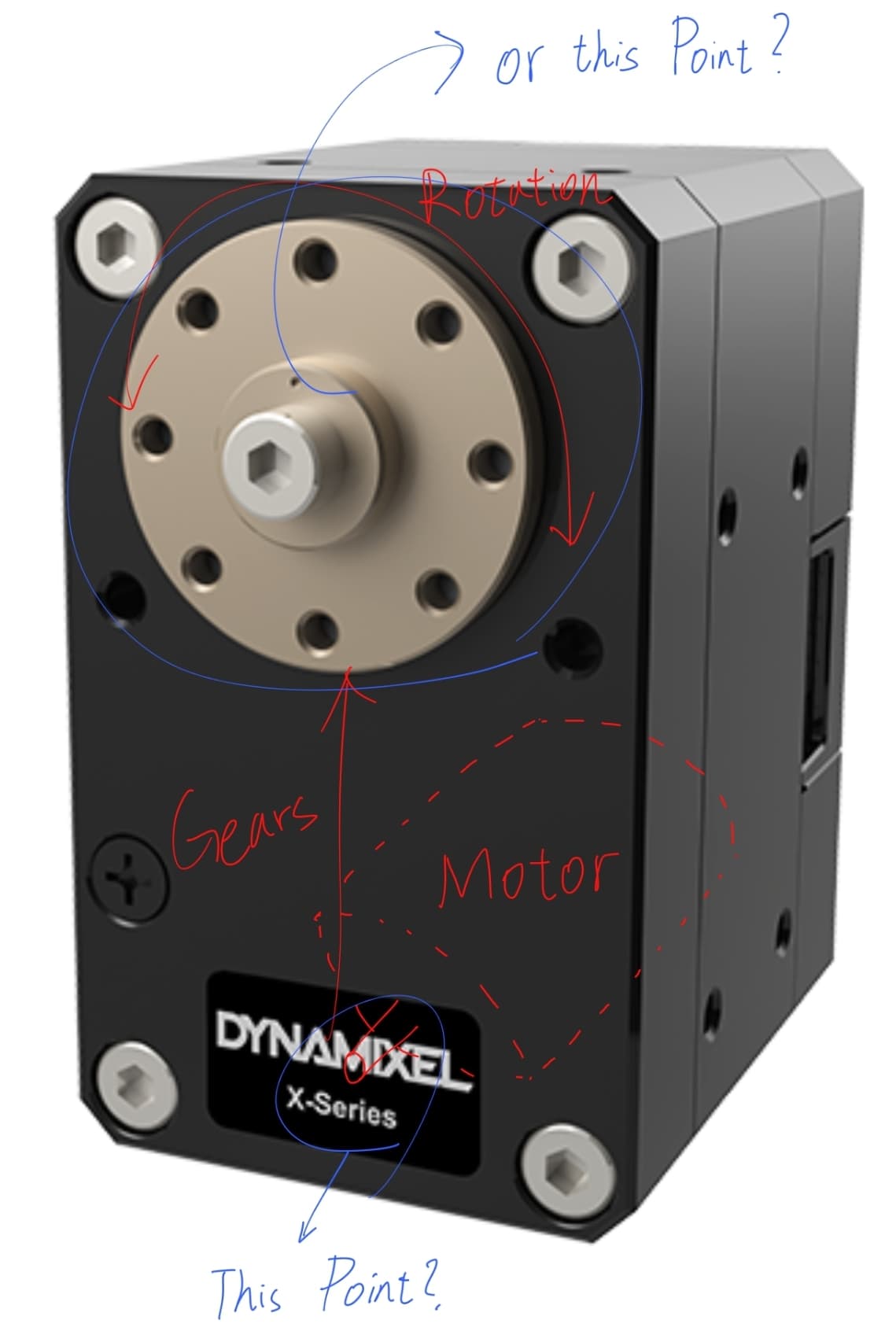
Where exactly on the motor are the values for Present Current, Present Position, and Present Velocity measured?
When examining the interior of the XM430-W350-T, I see that the motor is located beneath the external rotating shaft (Horn) and that power is transmitted upward to the Horn through a spur gear. Given this structure, do the values for Present Current, Present Position, and Present Velocity represent measurements taken at the motor’s shaft below, or are they measured at the external rotating shaft (Horn)?