Modular Self-Reconfigurable Continuum Robot for General Purpose Loco-Manipulation
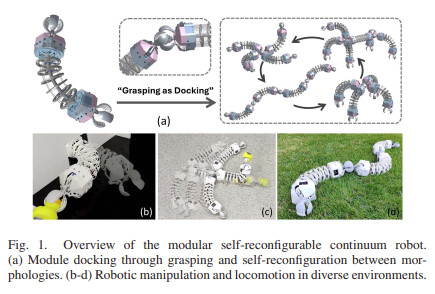
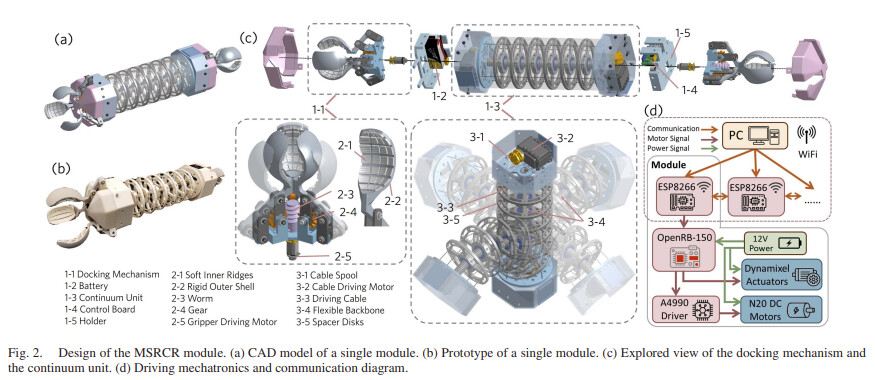
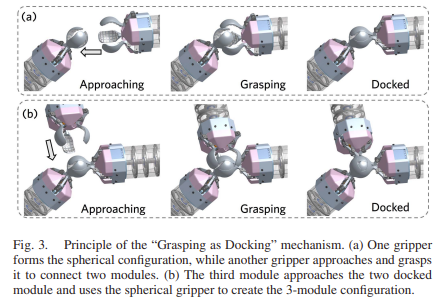
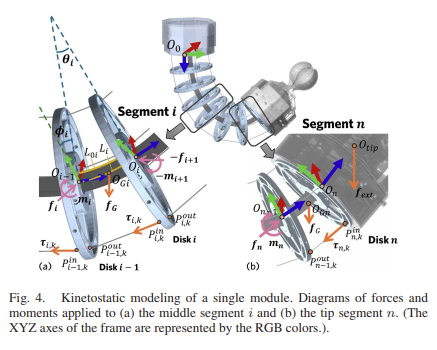
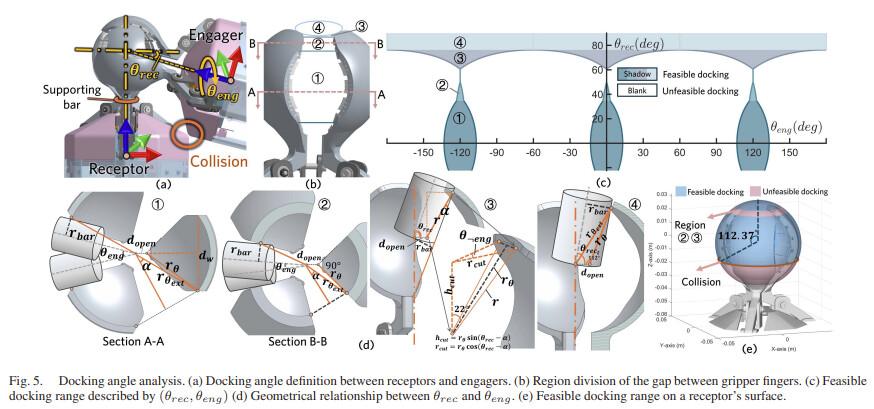
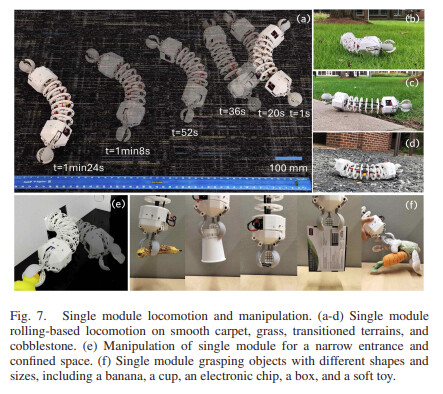
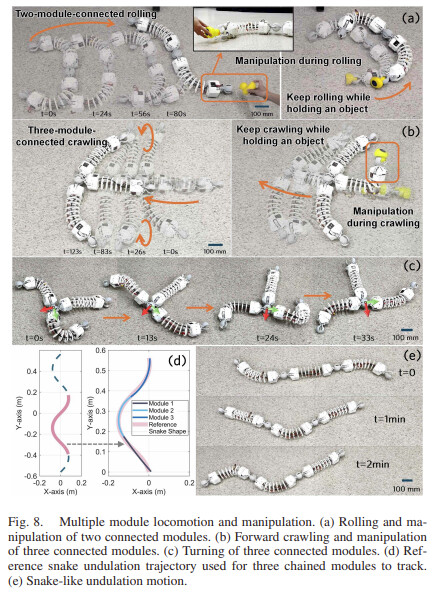
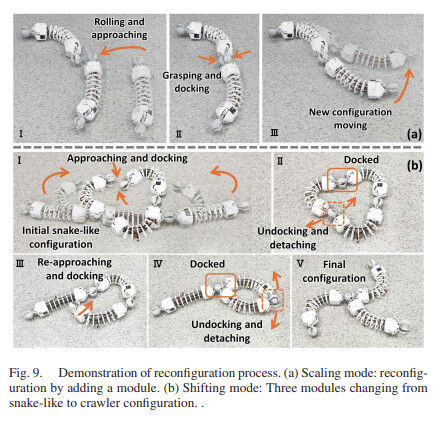
Abstract— Modular Self-Reconfigurable Robots offer exceptional adaptability and versatility through reconfiguration, but traditional rigid robot designs lack the compliance necessary for effective interaction with complex environments. Recent advancements in modular soft robots address this shortcoming with enhanced flexibility; however, their designs lack the capability of active self-reconfiguration and heavily rely on manual assembly. In this letter, we present a modular self-reconfigurable soft continuum robotic system featuring a continuum backbone and an omnidirectional docking mechanism. This design enables each module to independently perform loco-manipulation and self-reconfiguration. We then propose a kinetostatic model and conduct a geometrical docking range analysis to characterize the robot’s performance. The reconfiguration process and the distinct motion gait for each configuration are also developed, including rolling, crawling, and snake-like undulation. Experimental demonstrations show that both single and multiple connected modules can achieve successful loco-manipulation, adapting effectively to various environments.
Index Terms— Continuum robot, loco-manipulation, modular robot, self-reconfiguration.

Powered by DYNAMIXEL
All Credits Go To: Yilin Cai , Haokai Xu, Yifan Wang , Graduate Student Member, IEEE, Desai Chen, Wojciech Matusik, Wan Shou, and Yue Chen, Member, IEEE
Full Research Paper: https://missinglight.github.io/assets/pdf/msrcr_paper.pdf
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn