Abstract - Nowadays, the research in robotics field is growing.
One of the studies in robotics is the control method of the robotic
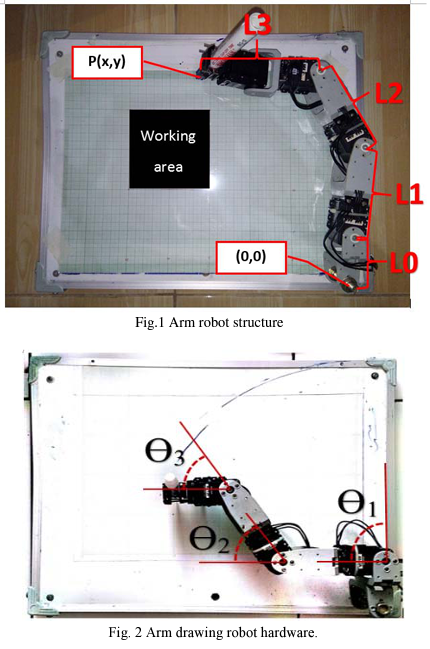
arm movement. In this research, a 3 DOF arm drawing robot was
built. An inverse kinematic models of the robot arm is made using
artificial neural network method. Artificial neural network model
was implemented in a GUI application. The ANN model can work
in real-time to control arm robot movement to reach certain
coordinates. Based on test results, the inverse kinematic models of
the arm drawing robot had an error rate under 2%. It is of 0.16%
for X coordinate and 0.46% for Y coordinate.
Index Terms – Neural Network Backpropagation, arm robot,
invers kinematic
Neural Network Implementation for Invers Kinematic Model of Arm Drawing Robot.pdf (1.3 MB)
This academic paper features our DYNAMIXEL AX-12A all-in-one smart actuators.
All credit goes to: R.Y. Putra, S. Kautsar, R.Y. Adhitya, Mat Syai’in, N. Rinanto, Ii Munadhif, S.T. Sarena, J. Endrasmono, Adi Soeprijanto of Shipbuilding Institute of Polytechnic Surabaya