IZAK.pdf (1.1 MB)
ABSTRACT:
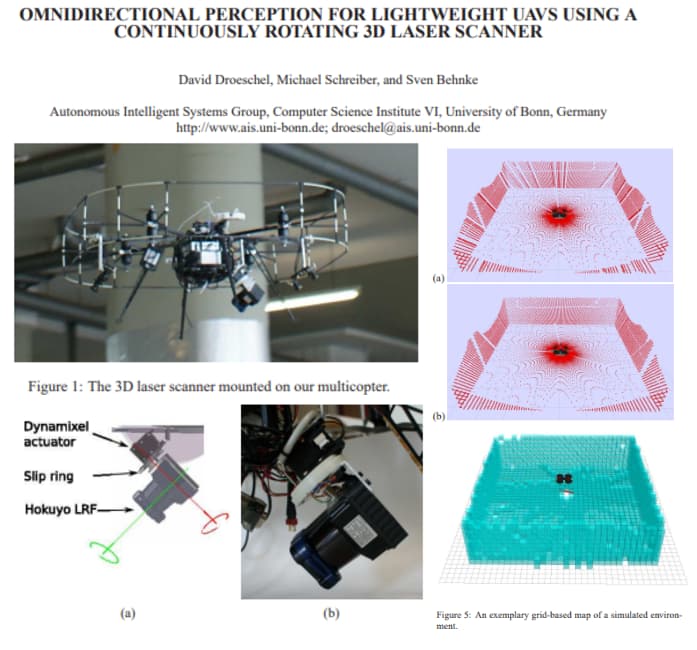
Many popular unmanned aerial vehicles (UAV) are restricted in their size and weight, making the design of sensory systems for these robots challenging. We designed a small and lightweight continuously rotating 3D laser scanner—allowing for environment perception in a range of 30 m in almost all directions. This sensor it well suited for applications such as 3D obstacle detection, 6D motion estimation, localization, and mapping. We aggregate the distance measurements in a robot-centric grid-based map. To estimate the motion of our multicopter, we register 3D laser scans towards this local map. In experiments, we compare the laser-based ego-motion estimate with ground-truth from a motion capture system. Overall, we can build an accurate 3D obstacle map and can estimate the vehicle’s trajectory by 3D scan registration.
KEY WORDS: UAVs, 3D Laser Scanner, Scan Registration, Obstacle Avoidance
This academic paper features our DYNAMIXEL MX-28 all-in-one smart actuators
All credit goes to: David Droeschel, Michael Schreiber, and Sven Behnke of the Autonomous Intelligent Systems Group, Computer Science Institute VI, University of Bonn, Germany