openRB에 BT410을 연결하여 사용하고싶습니다
BT410을 openRB에 각 TX,RX,GND,VCC에 맞추어 연결하였고, 프로그램을 작성하였으나 원하는데로 동작이 되지 않습니다
어떤 데이터라도 읽히면 LED를 켜는 프로그램입니다.
테스트 해보았으나 LED는 켜지지 않습니다.
BT-410의 경우 당연히 연결은 정상적으로 됩니다.
시리얼로 들어오는 데이터를 그데로 받으면 될 것으로 보여지는데 그게 안되는 것 같습니다.
RC100예제를 참조해보았으나 라이브러리 오류가 나옵니다 ㅠㅠㅠ
고수분들의 답변을 기다립니다~
@robonight
I hope that your browser can translate from English to Korean well, as I do not speak Hangul. 
You wrote that you are using a BT-410, so I am going to assume that you have soldered in a 4-pin header on the OpenRB-150 board, and you had plugged in your BT-410 there. Then your BT-410 is connected to Serial2 (as far as Arduino is concerned).
But in the example code that you shared, you only use Serial which is connected to the USB-C port and therefore to the Serial Monitor in the Arduino IDE, and not through BT-410 (Serial2).
So, my question for you is “What is on the other communication end of the BT-410?”
-
If it is a Text Terminal, you can just use Serial2.begin(), Serial2.read(), Serial2.write() as normal. You do not need to include <RC100.h>.
-
If it is a Physical or Virtual RC-100 Remote Controller, then you are right, you would need to include <RC100.h>. However, you wrote that you got a library error when you use the RC100.ino example, this is because that example uses the DynamixelShield library not the Dynamixel2Arduino library that you showed in your shared example. Furthermore, the RC100.ino example is using Serial1 - see Line 38 in the picture below
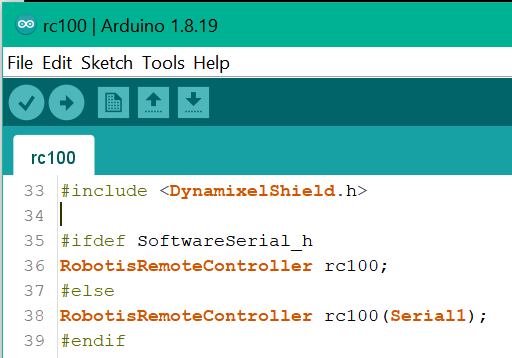
So, you will need to change Serial1 to Serial2 on Line 38, and then that RC100.ino example should work for you (using DynamixelShield Library).
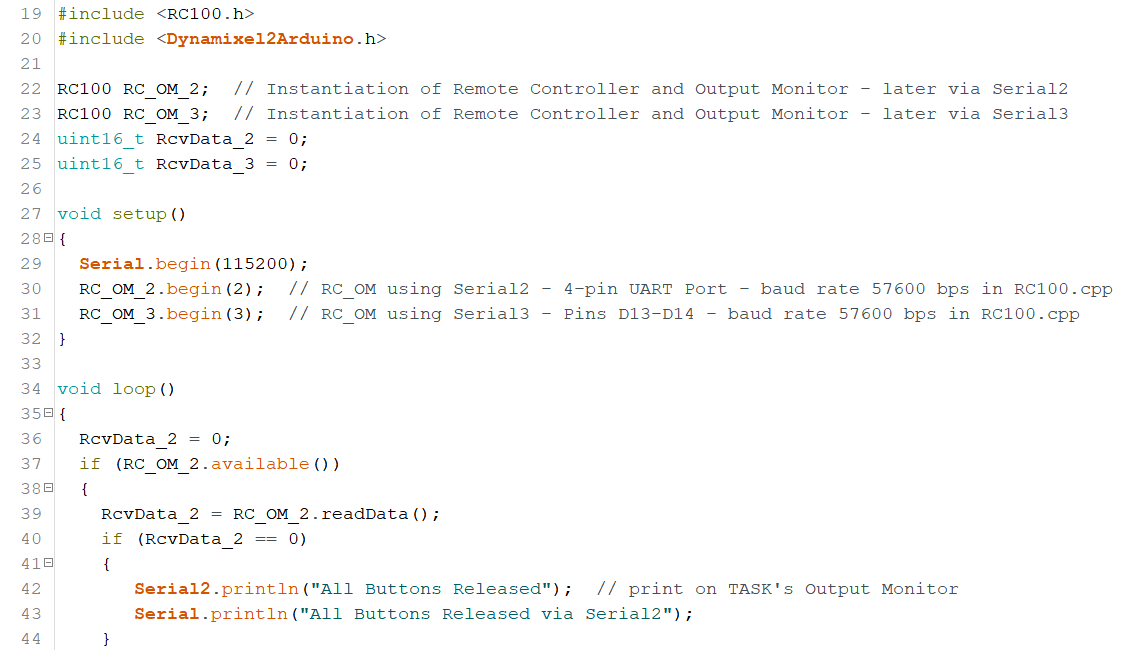
If you want to stay with the Dynamixel2Arduino Library, then you have to use this coding approach
Good Luck with your project!
1 Like