I hope that your browser can translate from English to Korean well, as I do not speak Hangul. ![]()
You wrote that you are using a BT-410, so I am going to assume that you have soldered in a 4-pin header on the OpenRB-150 board, and you had plugged in your BT-410 there. Then your BT-410 is connected to Serial2 (as far as Arduino is concerned).
But in the example code that you shared, you only use Serial which is connected to the USB-C port and therefore to the Serial Monitor in the Arduino IDE, and not through BT-410 (Serial2).
So, my question for you is “What is on the other communication end of the BT-410?”
-
If it is a Text Terminal, you can just use Serial2.begin(), Serial2.read(), Serial2.write() as normal. You do not need to include <RC100.h>.
-
If it is a Physical or Virtual RC-100 Remote Controller, then you are right, you would need to include <RC100.h>. However, you wrote that you got a library error when you use the RC100.ino example, this is because that example uses the DynamixelShield library not the Dynamixel2Arduino library that you showed in your shared example. Furthermore, the RC100.ino example is using Serial1 - see Line 38 in the picture below
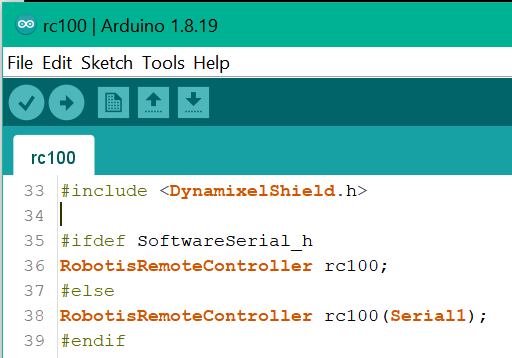
So, you will need to change Serial1 to Serial2 on Line 38, and then that RC100.ino example should work for you (using DynamixelShield Library).
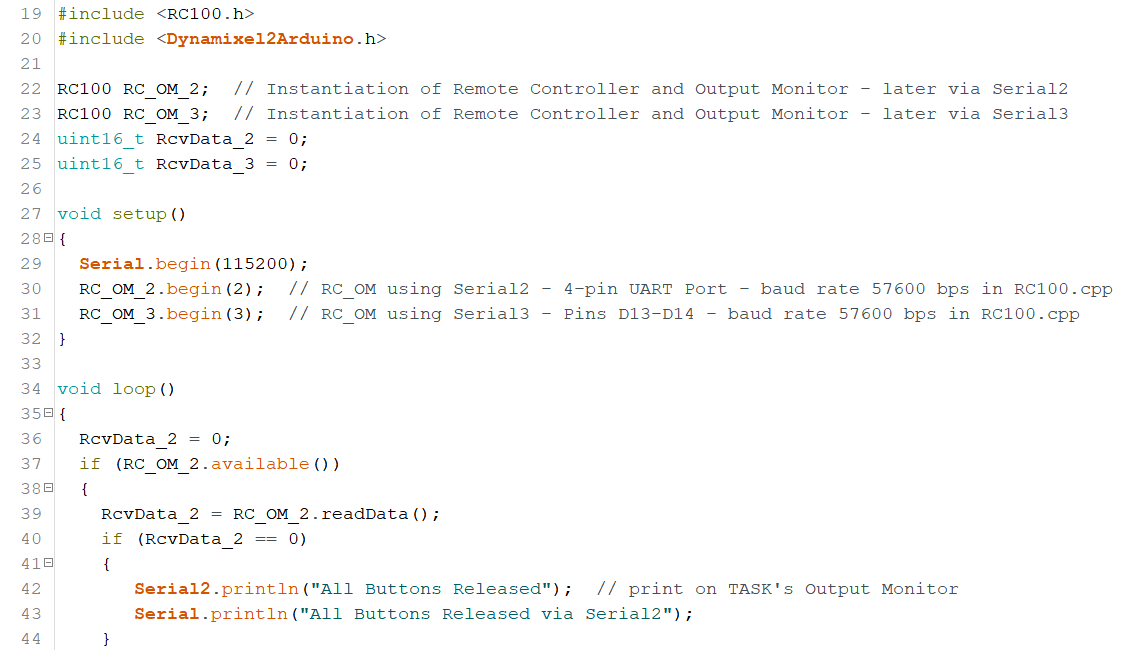
If you want to stay with the Dynamixel2Arduino Library, then you have to use this coding approach
Good Luck with your project!