I need to give power to 24 dynamixel servos, using 2 U2D2 power hubs. Can I connect the two power hubs in series, with a separate power supply for each powe hub?
Can you give more details about the DXL model(s) used? What is the voltage output of your power supplies? How much amperage can each power supply provide?
I will be using 15 Dynamixel XM540-W270-R, and 9 Dynamixel XM430-W350R. An upper bound for the required current should be around 3A per XM540-W270-R, and 1.5A per XM430-W350-R, so 3*15+1.5*9 = 58.5. This peak current should not be sustained over long periods of time however. I was thinking to use two 3S (11.1V) 30C LiPo batteries, but I’m not sure how to connect everything together, especially considering the stated max current for U2D2 power hub is 10A.
What is the Ah rating on your LiPo battery?
Also how do you want to control them? Via U2D2?
I just remember another Robotis recommendation which is not to daisy-chain more than 4 actuators within one mini-chain to minimize possible DXL control packet delays. So considering all that I would suggest 3 U2D2 power hubs because each hub has only THREE 4-pin connectors. So hub 1 for 9 dxls, hub 2 for 7 dxls and hub 3 for 8 dxls from the power point of view and have all 3 hubs share into a common ground with your controller (that is to hook up the power supplies in parallel). You also need to try to wire up the control circuit in parallel by using these 4-pin hubs - see picture below
I haven’t decided on the Ah rating quite yet, but probably somewhere around 5000mAh in total should be enough, possible a bit more.
So with three power hubs maybe it would be better to have one battery pack for each power hub, connect a battery to each power hub, and between the power hubs only connect the data wires. What would be the advantage of using a 4-pin hub like the one you showed?
I was trying to keep all DXLs to be evenly distributed “wire-distance” wise from the U2D2 port to minimize possible DXL communication packet delay/synchronization. If you use a single big daisy chain for all DXLs some are closer to the U2D2 and some have to be further away from it.
Hi, I’ve been looking at different options for my situation. The 4 pin board you linked to seems to be out of stock in the robotis store, but I found it here: 4P JST Expansion Board | Génération Robots
However, on that site it says that each port is capable of providing up to 5V of power. However, the Dynamixel X-series uses 12V, so does that mean the expansion board can’t be used with these motors?
I don’t know what Generation Robots meant by “5V Power” - you better ask them directly about it. I had never seen/read that description mentioned on the USA or Korea web sites.
The 4P JST Expansion Board is designed for RS485 type of actuators - see screen capture below.
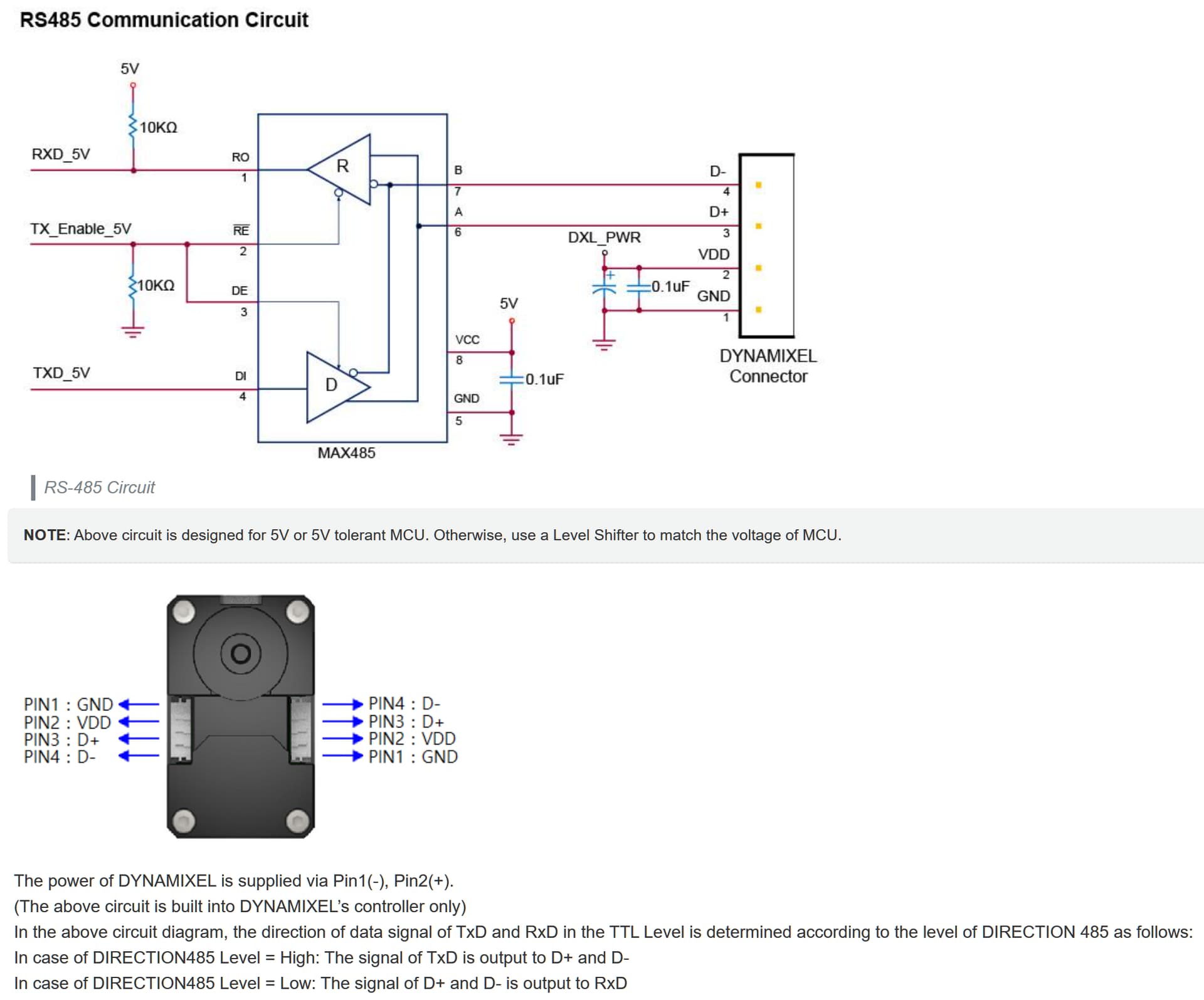
So VDD is the voltage used by the actual motor of the actuator: so, for the XM-540 and XM-430 it is 12 V. This is the Power Circuit via the U2D2 Power Hub.
D+ and D- are the data control lines: so, they are respectively at +5V and -5V. Not much current would go through them. This is the Control Circuit going through the U2D2 itself only. And here is where the 4P JST Expansion Boards are going to be used.
However, I had never seen an overall Max Current rating for these Expansion Boards - so may be @ROBOTISUSA can inquire with the engineers at the Korean HQ Office?
@roboteer @watchieboy
I can certainly request confirmation on any official maximum amperage rating for these hub boards, if you’d like an official number but I can attest personally to running 30A through the boards with no issues as of yet.
I would also like to add on to your statements related to limiting the length of the daisy chains to around 4 units. Longer chains than this also introduce the possibility of voltage sags on the units furthest away from the power input, especially during high load conditions. Adding in additional power inputs every 4 or so actuators will help alleviate this possibility.