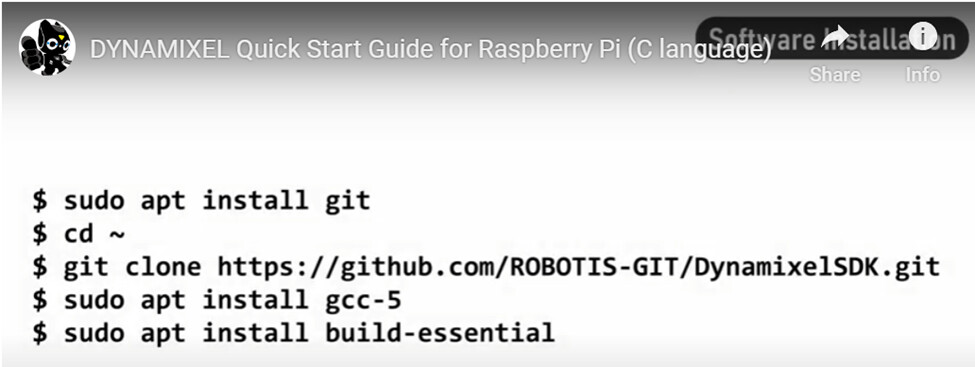
Here again to share another great Quick Start video from our Open Source Team YouTube channel- this time it’s for using DYNAMIXEL servos with a Raspberry Pi single-board computer! The Raspberry Pi is one of the most popular low-cost computer boards for maker and robotics projects, and DYNAMIXELs are a perfect companion for these powerful little boards. This Quick Start guide focuses on setting up a DYNAMIXEL with the DYNAMIXEL Starter Set components, and shows a DYNAMIXEL SDK example in C.
Feel free to make a post if you have any questions!
@ROBOTISUSA,
Great demo!
Regarding the USB cable between the RPi’s USB port and the microUSB port on the U2D2, what kind of USB cable was it? Just a plain USB data cable? or an OTG cable with the RPi being the host?
Just to confirm that this procedure works OK on a Jetson Nano also. But the user has to reissue the command “sudo chmod a+rw /dev/ttyUSB0” before running the executable code - every time - after logging or disconnecting from ttyUSB0 on the Jetson Nano. On the RPi4B, I did not have to do this.
UPDATE: 4/28/2023
The above procedures described for an RPi-3B need to be updated and adapted for use with an Orin Nano Dev Kit:
The GIT tool is already the latest version when JetPack 3.5.1 is installed on Orin Nano.
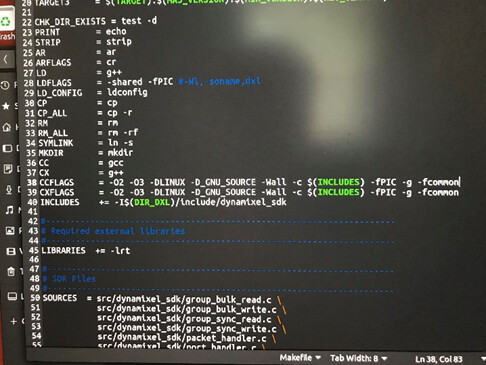
The GCC tool is also already installed, and it is at V. 9.4.0, so the ROBOTIS-provided MakeFiles (corresponding to the C and C++ language options) need to be updated with the “-fcommon” argument for CCFLAGS and CXFLAGS, as shown in the picture below (lines 38 and 39) – so that the “make” tool can do its job without any error - see following posts:
“build-essential” is also already up-to-date with JetPack 3.5.1.
")