Just to confirm that this procedure works OK on a Jetson Nano also. But the user has to reissue the command “sudo chmod a+rw /dev/ttyUSB0” before running the executable code - every time - after logging or disconnecting from ttyUSB0 on the Jetson Nano. On the RPi4B, I did not have to do this.
UPDATE: 4/28/2023
The above procedures described for an RPi-3B need to be updated and adapted for use with an Orin Nano Dev Kit:
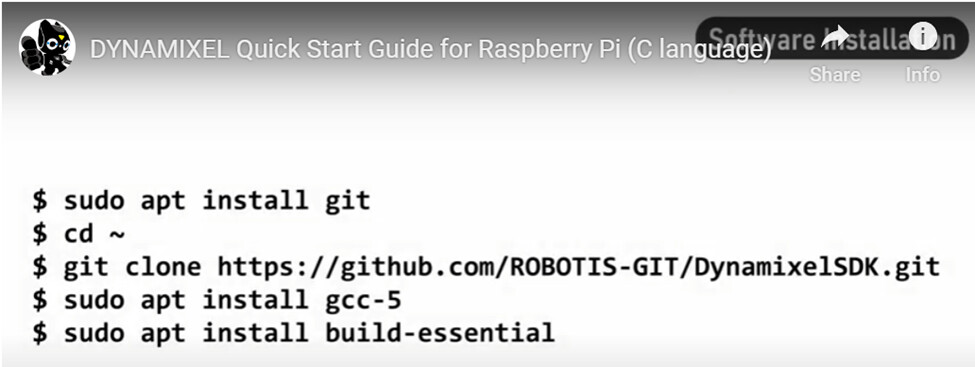
- The GIT tool is already the latest version when JetPack 3.5.1 is installed on Orin Nano.
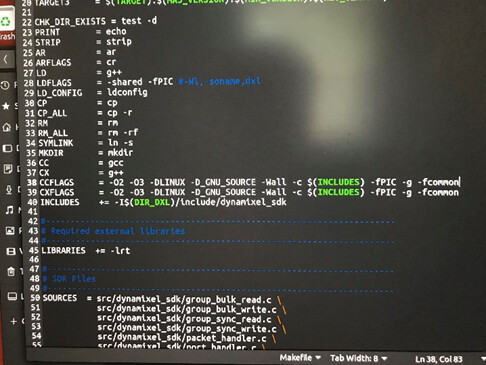
- The GCC tool is also already installed, and it is at V. 9.4.0, so the ROBOTIS-provided MakeFiles (corresponding to the C and C++ language options) need to be updated with the “-fcommon” argument for CCFLAGS and CXFLAGS, as shown in the picture below (lines 38 and 39) – so that the “make” tool can do its job without any error - see following posts:
- “build-essential” is also already up-to-date with JetPack 3.5.1.
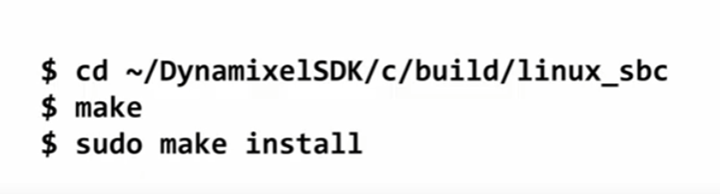
The steps shown below are still valid: