Redesignandcost.pdf (523.5 KB)
Abstract—
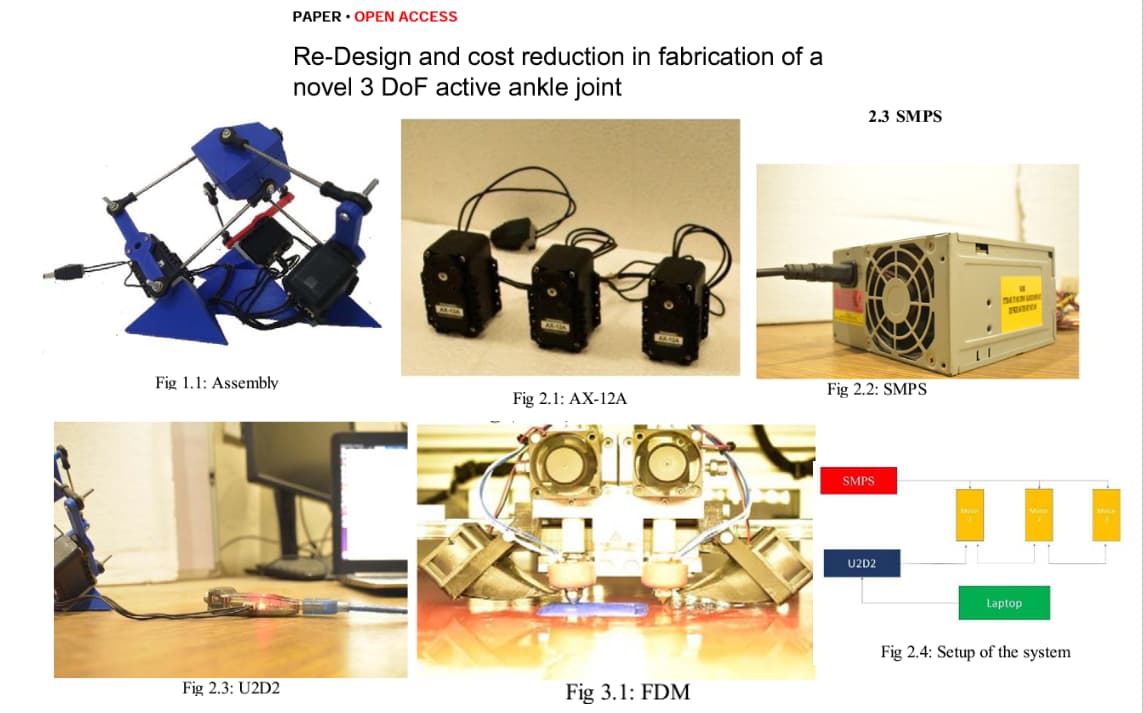
The mechanism of active ankle is a novel 3 DoF parallel mechanism that operates in an almost spherical manner. It is a project by DFKI Germany and currently it is being used in medical rehabilitation. The project was re-engineered with techniques like CAD and Rapid-Prototyping to reduce the cost of fabrication. In the present paper, a comprehensive study of the design, and fabrication of the active ankle is provided. Various motions of human ankle joint such as adduction-abduction, inversion-eversion, and plantarflexion-dorsiflexion, was achieved by the prototype. This project was modeled in CAD software like SolidWorks, accordingly mounting were prepared for the available motors. Various parts of Active Ankle prototype was printed using Olivetti 3D printer by feeding the .gcode file created by slicing software Cura. The paper also discuss about the integration of Dynamixel motors with MATLAB for control. Finally, the paper talks about various application of parallel manipulator in the area of medical rehabilitation.
This academic paper features our DYNAMIXEL AX-12A all-in-one smart actuators
All credit goes to: Ranjeet Ranjan, Richa Pandey, Ojas Suryawanshi, Purushottam Kumar, Sushil Kumar