RealAnt.pdf (4.9 MB)
Abstract—
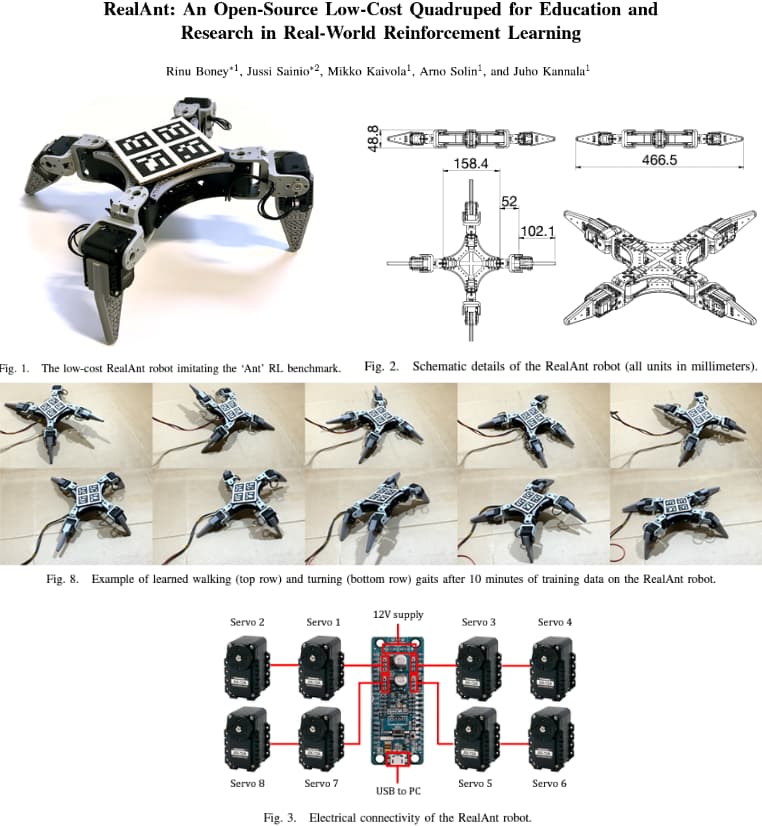
Current robot platforms available for research are either very expensive or unable to handle the abuse of exploratory controls in reinforcement learning. We develop RealAnt, a minimal low-cost physical version of the popular ‘Ant’ benchmark used in reinforcement learning. RealAnt costs only ∼350 AC ($410) in materials and can be assembled in less than an hour. We validate the platform with reinforcement learning experiments and provide baseline results on a set of benchmark tasks. We demonstrate that the RealAnt robot can learn to walk from scratch from less than 10 minutes of experience. We also provide simulator versions of the robot (with the same dimensions, state-action spaces, and delayed noisy observations) in the MuJoCo and PyBullet simulators. We open-source hardware designs, supporting software, and baseline results for educational use and reproducible research.
This academic paper features our DYNAMIXEL AX-12A all-in-one smart actuators
All credit goes to: Rinu Boney, Jussi Sainio, Mikko Kaivola, Arno Solin, and Juho Kannala