Soft Vision-Based Tactile-Enabled SixthFinger: Advancing Daily Objects Manipulation for Stroke Survivors
Abstract— The presence of post-stroke grasping deficiencies
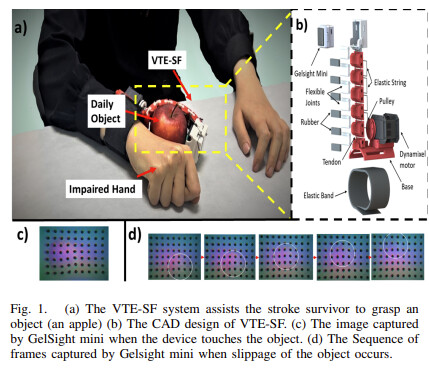
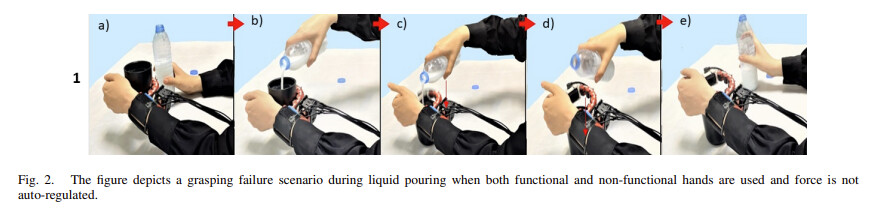
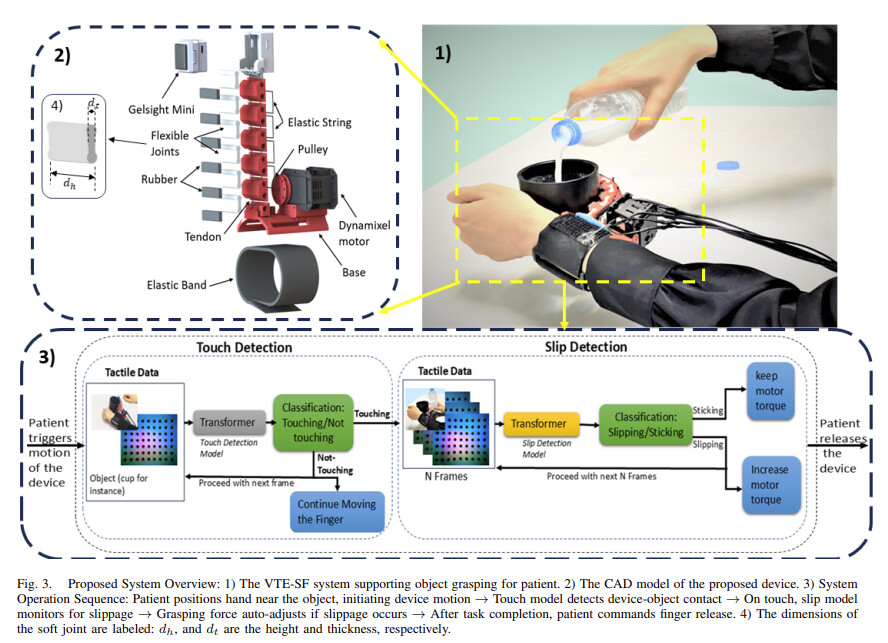
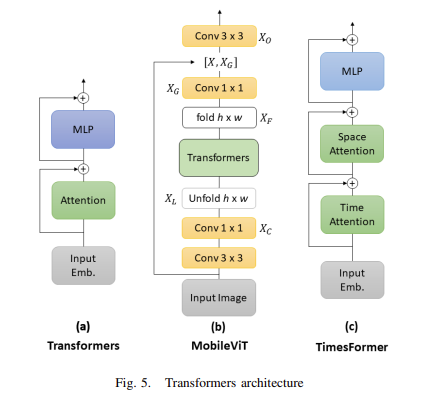
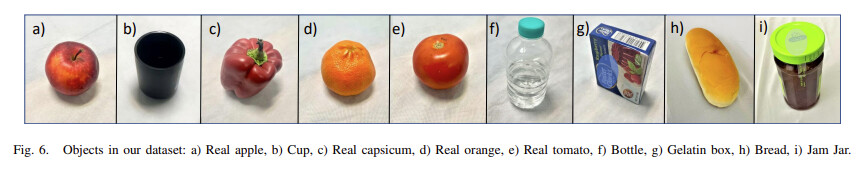
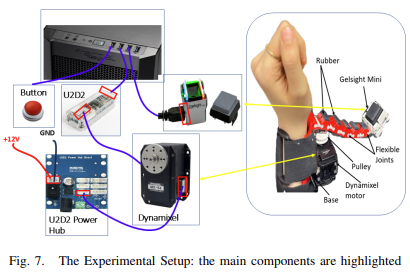
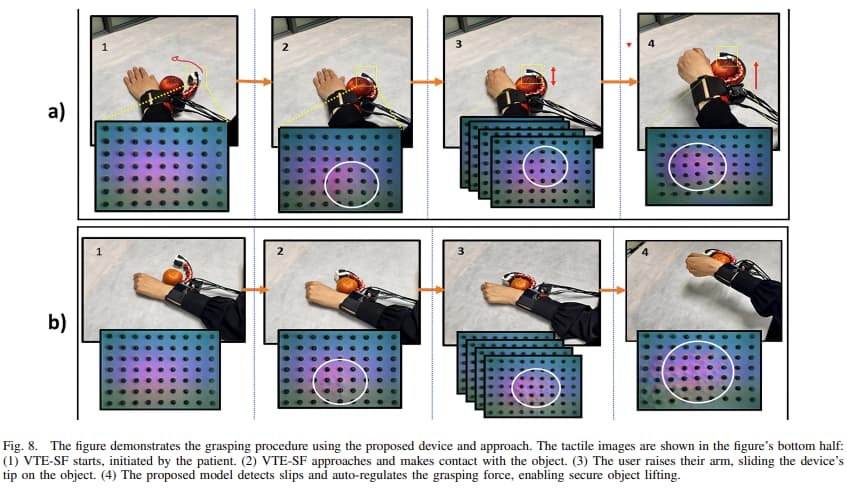
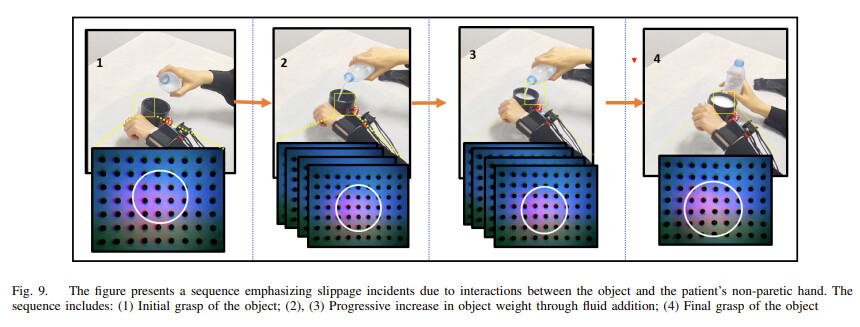
highlights the critical need for the development and implementation of advanced compensatory strategies. This paper introduces a novel system to aid chronic stroke survivors through the development of a soft, vision-based, tactile-enabled extra robotic finger. By incorporating vision-based tactile sensing, the system autonomously adjusts grip force in response to slippage detection. This synergy not only ensures mechanical stability but also enriches tactile feedback, mimicking the dynamics of human-object interactions. At the core of our approach is a transformer-based framework trained on a comprehensive tactile dataset encompassing objects with a wide range of morphological properties, including variations in shape, size, weight, texture, and hardness. Furthermore, we validated the system’s robustness in real-world applications, where it successfully manipulated various everyday objects. The promising results highlight the potential of this approach to improve the quality of life for stroke survivors.
Index Terms— Supernumerary Robotic Finger, Wearable
Robots, Assistive Technologies, Tactile Sensing, Transformers
Powered by DYNAMIXEL
All Credits Go To: Basma Hasanen, Mashood M. Mohsan, Abdulaziz Y. Alkayas, Federico Renda and Irfan Hussain
Full Research Paper: https://arxiv.org/pdf/2501.06806
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn