Kodyakov_2017_J._Phys.__Conf._Ser._803_012074.pdf (929.4 KB)
Abstract
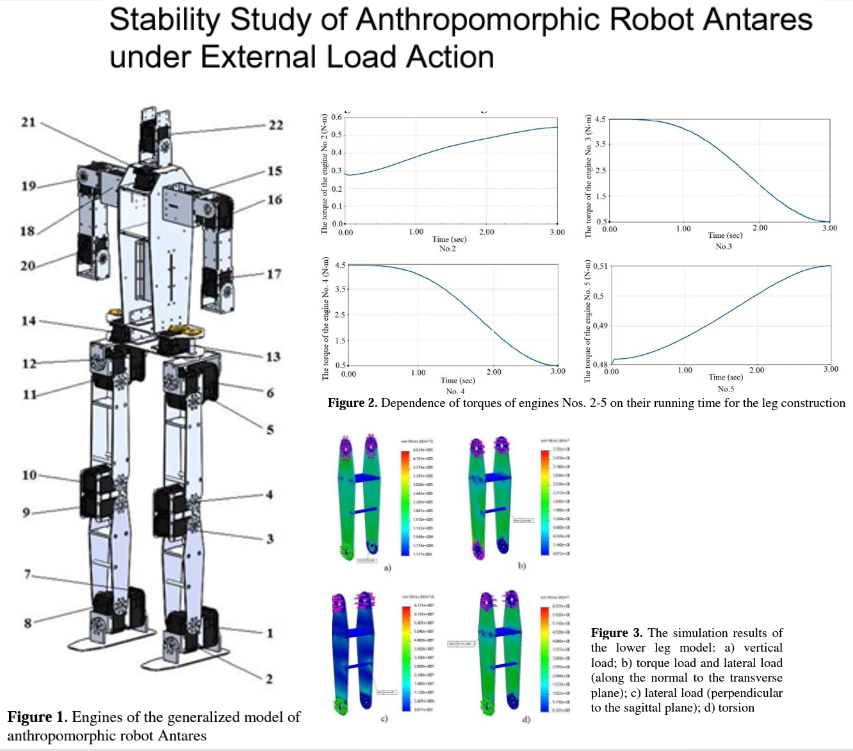
The paper presents the study of the behavior of the major structural elements of the lower limbs of anthropomorphic robot Antares under the influence of different types of loads (torsion, fracture). We have determined the required values for actuators torques for motion of the robot in space. The maximum values of torques are 5 Nm and 5.2 Nm respectively, and are able to withstand the upper and lower leg structures.
This academic paper features our DYNAMIXEL MX-28 & MX-64 all-in-one smart actuators
All credit goes to: A S Kodyakov, N A Pavlyuk, V Yu Budkov, R A Prakapovich, St. Petersburg from the Institute for Informatics and Automation of the Russian Academy of Sciences, St. Petersburg, Russia 2 United Institute of Informatics Problems, Minsk, Belarus