studyofradiation.pdf (2.6 MB)
ABSTRACT
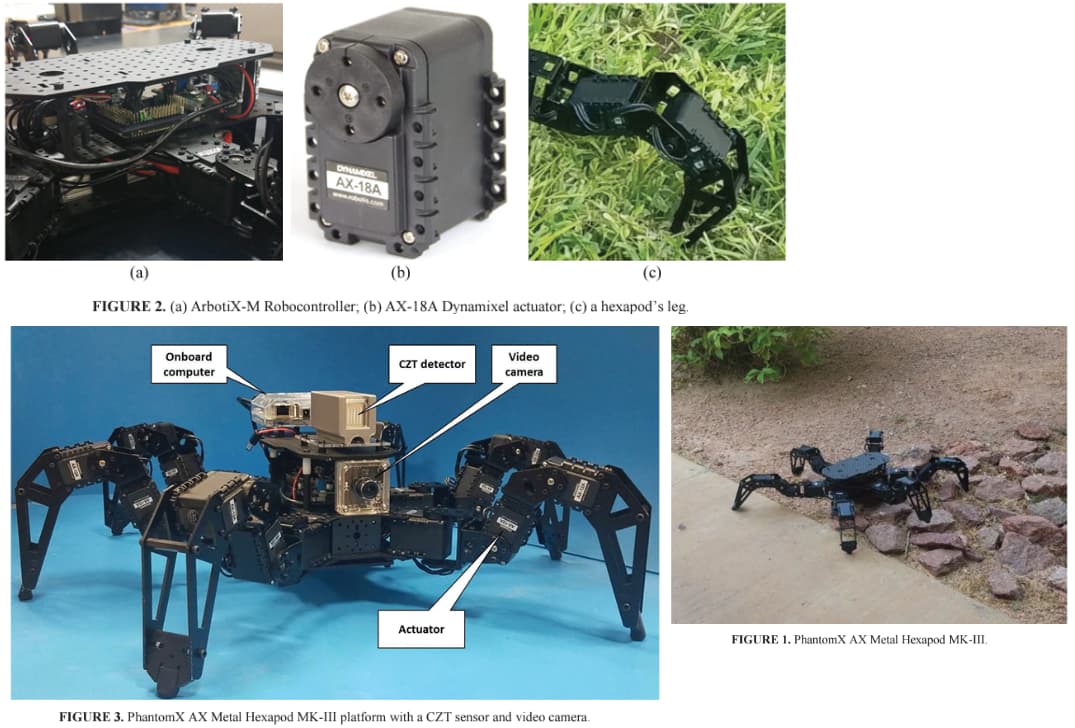
From routine monitoring in facilities to emergency situations, like Fukushima or Chernobyl accidents, gamma ray and neutron measurements are essential. In some cases, workers cannot enter the contaminated zones due to the high levels of radiation. Robotic platforms are used to carry radiation detectors in order to enable remote sensing so that measurements are possible while keeping humans away from the risk of exposure [1,2]. In contaminated zones, the platform’s operational time is limited. Irradiation causes microscopic defects in materials that form dislocation loops, voids, defects, or even termination of the robotic platform completely. The prediction of radiation damage in electronics of the robotic platform is important so that the operational time can be optimized for the work in the radiation areas. The electronic parts must be shielded. The shielding would add weight to the platform, and could limit the operational capabilities of the robot. The goal is to have the robot achieve the most tasks during the required time period. PhantomX hexapod “spider robot” was utilized in this study. Cadmium zinc telluride (CZT) detector was integrated on the platform in addition to the video camera via Robot Operating System (ROS). The Monte Carlo code, FLUKA, was used to calculate the number of atoms that are displaced from the lattice sites (DPA) in the electronic components of the system. The packaging of the electronic parts and the shielding design was determined to increase the robot’s lifetime under high radiation dose conditions while keeping the optimal payload.
This academic paper features our DYNAMIXEL AX-18A all-in-one smart actuators
All credit goes to: Monia Kazemeini, Jean Chagas Vaz and Alexander Barzilov from the University of Nevada, Las Vegas