0d63637d231d76cc32d9106ab0df76c4.pdf (969.2 KB)
Abstract—
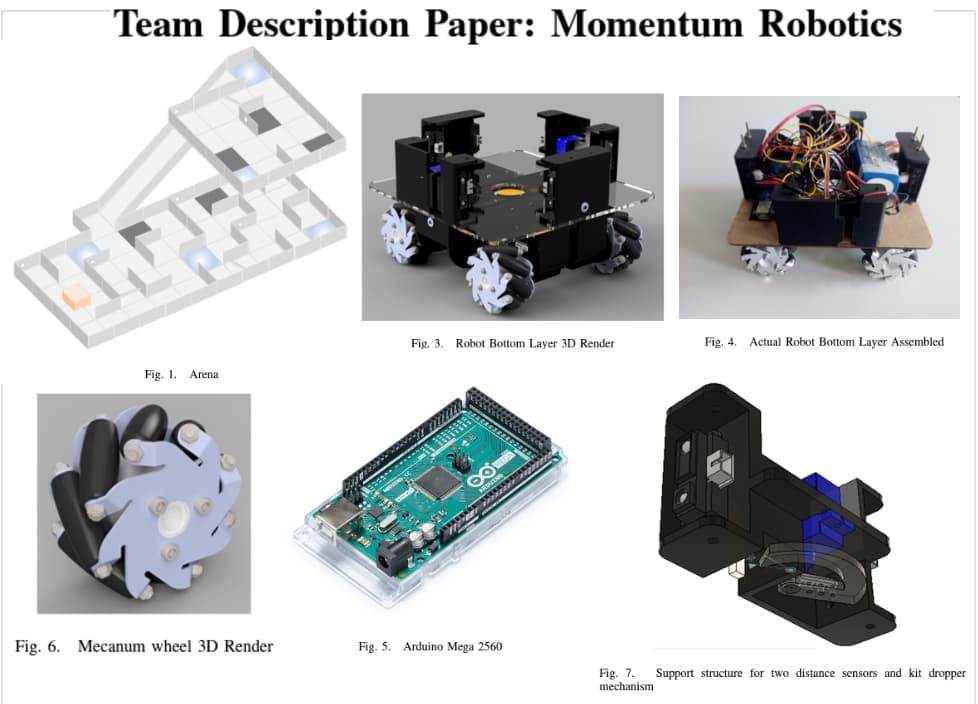
This paper presents a description of the process of programming, assembly and the strategies used to make our team’s robot, which will be used during the Latin American Robotics Competition of 2018 in the Rescue Maze category. The robot is moved using four Mecanum wheels, each rotated by a Dynamixel AX-18A Servo. It identifies the heated tiles using 4 Melexis Temperature Sensors, one on each side of the robot. The source code was written in C++ and is processed in an Arduino Mega board. The algorithms used- Breadth-First Search and Wall-Follower- combined with the RPLidar, ensure that the robot will visit all tiles possible.
This academic paper features our DYNAMIXEL AX-18A all-in-one smart actuators
All credit goes to: Giulia E. O. Castro, Guilherme Senday, Pedro S. Chen, Rafael K. Sakamoto, Raphael F. Correia, Vitor S. Figueiredo