Tendon-driven Grasper Design for Aerial Robot Perching on Tree Branches
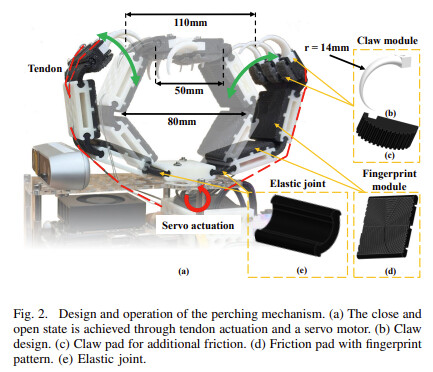
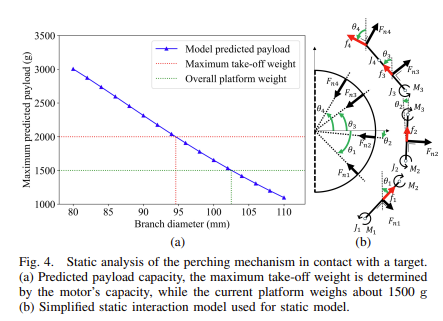
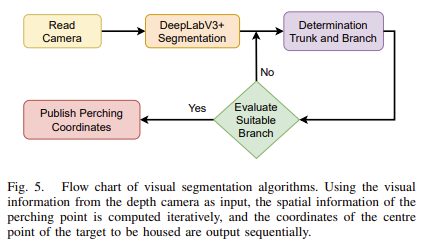
Abstract— Protecting and restoring forest ecosystems has become an important conservation issue. Although various robots have been used for field data collection to protect forest ecosystems, the complex terrain and dense canopy make the data collection less efficient. To address this challenge, an aerial platform with bio-inspired behaviour facilitated by a bio-inspired mechanism is proposed. The platform spends minimum energy during data collection by perching on tree branches. A raptor inspired vision algorithm is used to locate a tree trunk, and then a horizontal branch on which the platform can perch is identified. A tendon-driven mechanism inspired by bat claws which requires energy only for actuation, secures the platform onto the branch using the mechanism’s passive compliance. Experimental results show that the mechanism can perform perching on branches ranging from 30 mm to 80 mm in diameter. The real-world tests validated the system’s ability to select and adapt to target points, and it is expected to be useful in complex forest ecosystems.

Powered by DYNAMIXEL
Full Project Website: Tendon-driven Grasper Design for Aerial Robot Perching on Tree Branches
All Credits Go To: Haichuan Li, Ziang Zhao, Ziniu Wu, Parth Potdar, Long Tran, Ali Tahir Karasahin, Shane Windsor, Stephen G. Burrow, Basaran Bahadir Kocer
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn