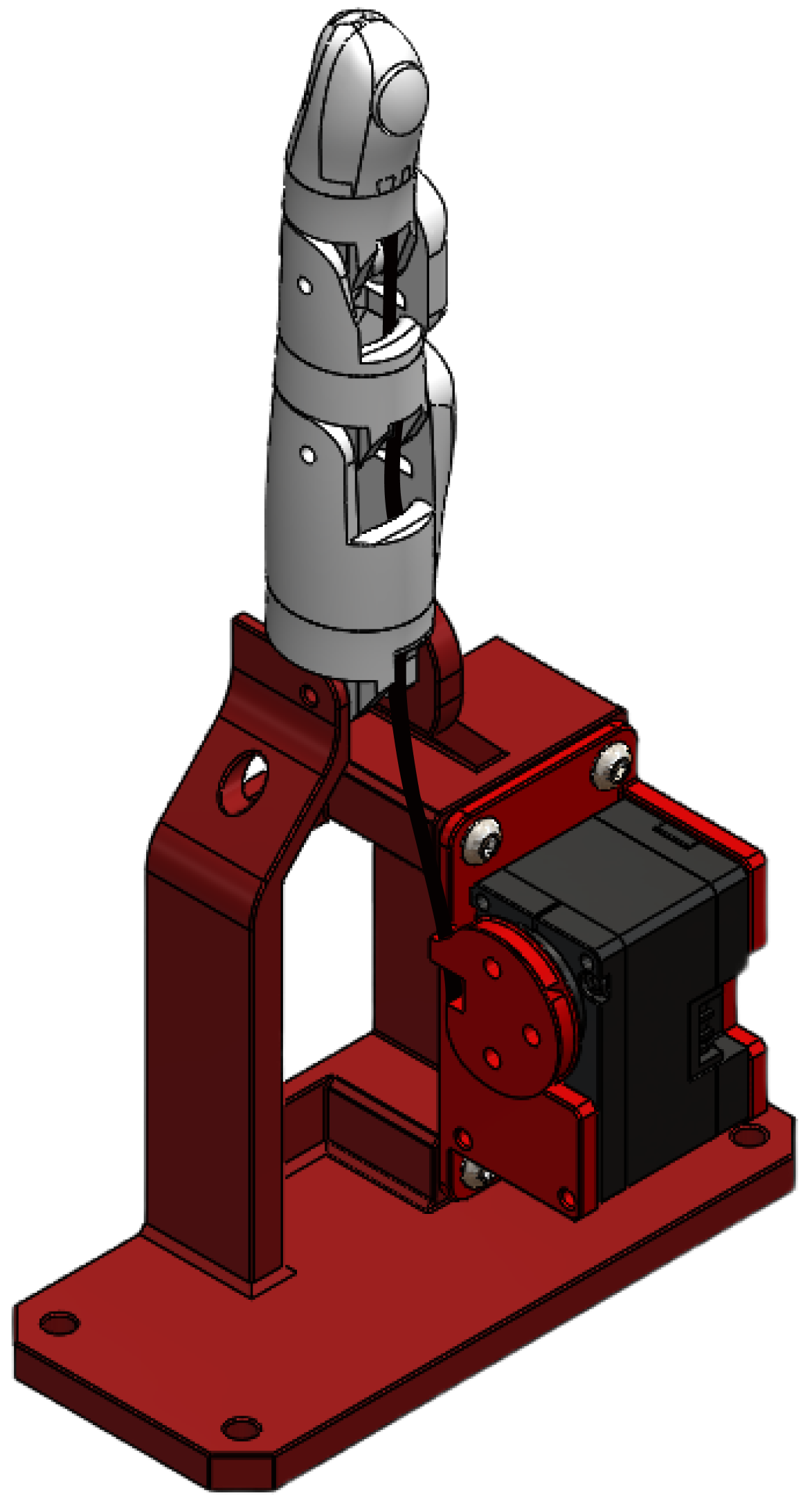
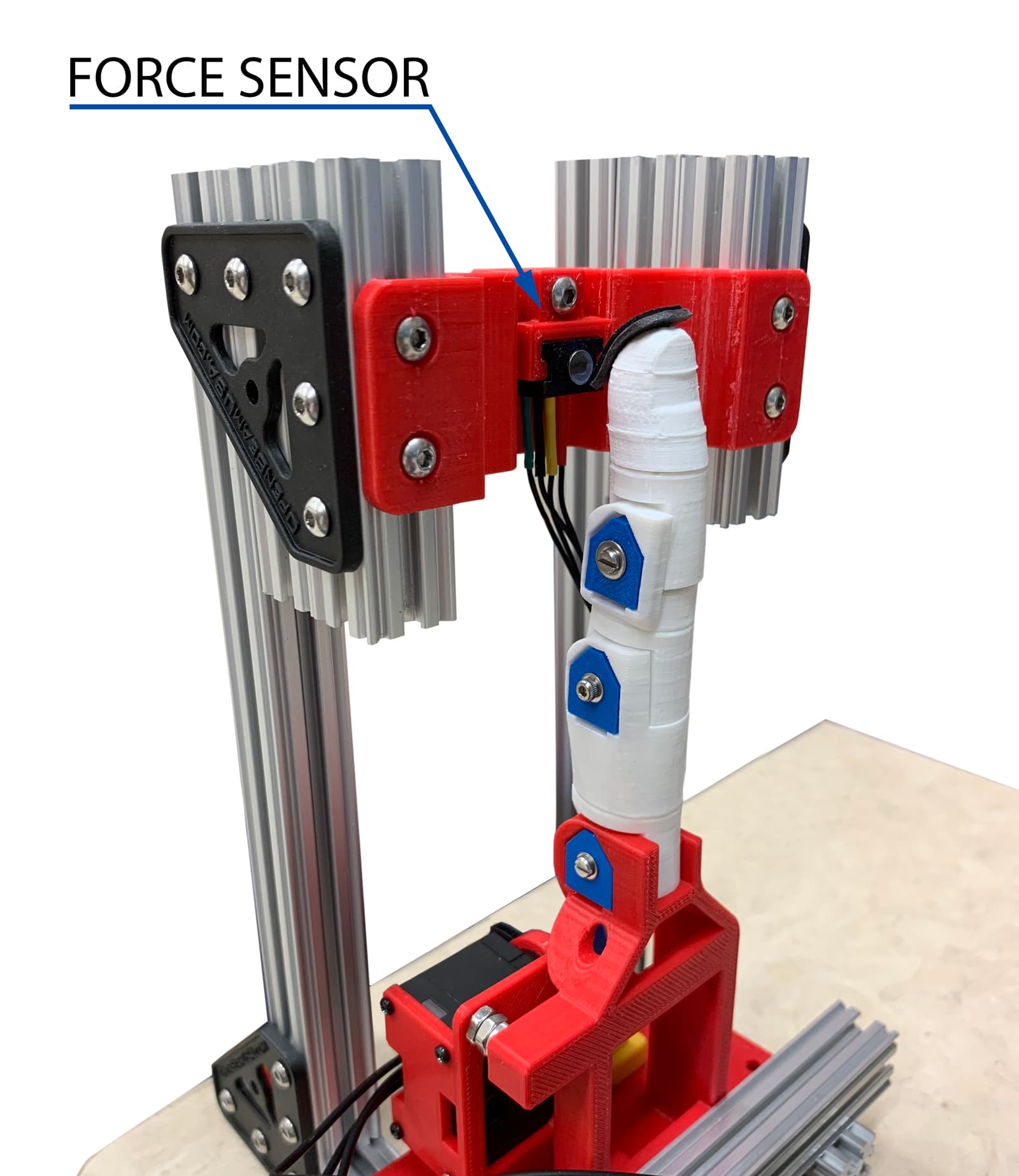
The HANDi Hand, or the Humanoid Anthropometric Naturally Dextrous Intelligent Hand is an open source, 3D printed hand prosthesis that the BLINCdev community first started working on in 2014. Previously, the RC servo motors (Hitec HS-35HD) used to drive the hand had become discontinued or difficult to source. A finger testing unit (our entry to the miniatures competition) was developed to evaluate various replacements including the XL330-M288-T and XC330-T288-T Dynamixel actuators. The unit includes a test stand, HANDi Hand finger (driven by a zip tie mechanism), and a spool adapter to connect the zip tie to the horn of the actuator. The platform has the dimensions of about 90x25x162mm and we estimate that approximately 80 of them could fit into a 12 inch cube.
Using the Dynamixel Wizard 2.0 and brachI/Oplexus software we ran the actuators through a battery of tests measuring the range of motion, finger closing speed, maximum fingertip force, current draw, and temperature response. The Dynamixel actuators performed well for most of the tests matching or outperforming many of the RC servo options that we considered.

Next year, we will work on redesigning the HANDi Hand to support multiple actuators including the XL330 and XC330. We are planning on including the HANDi Hand Test Finger in the open source release to make it easier for people to develop new servo options for the hand.