터틀봇3로 교육을 하는 중인데
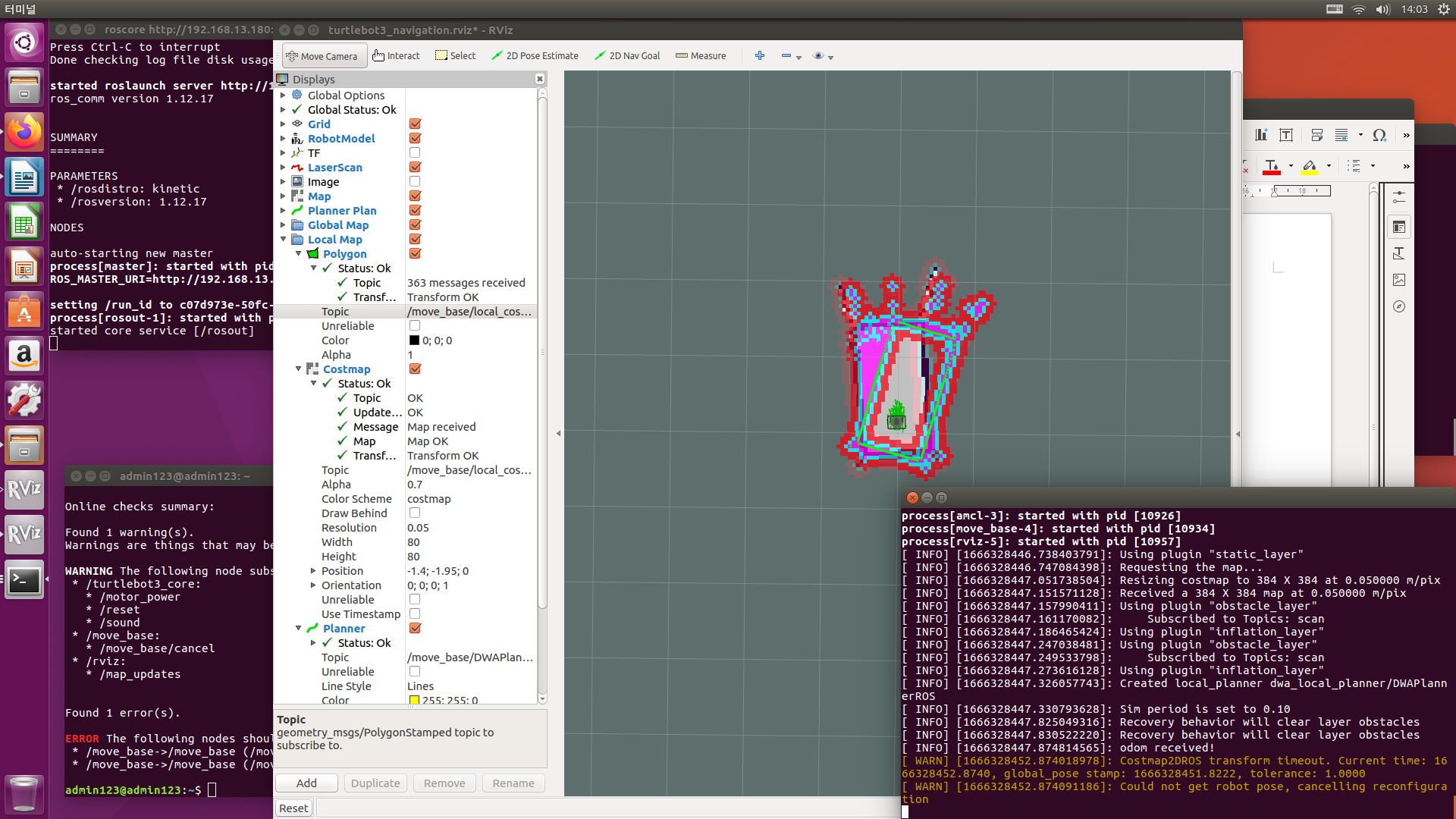
위 사진처럼 맵을 저장 후 네비게이션을 실행 시 전/후진은 이상이 없지만 좌우로 회전이 들어가기만 하면
rViz에서 번짐 현상과 Costmap2DROS transform timeout 이라는 오류구문이 뜨는 상황입니다.
이에 대해서 해결방법이 있는지 찾고 싶습니다.
터틀봇3로 교육을 하는 중인데
위 사진처럼 맵을 저장 후 네비게이션을 실행 시 전/후진은 이상이 없지만 좌우로 회전이 들어가기만 하면
rViz에서 번짐 현상과 Costmap2DROS transform timeout 이라는 오류구문이 뜨는 상황입니다.
이에 대해서 해결방법이 있는지 찾고 싶습니다.
안녕하세요,
OpenCR의 펌웨어 버전이 낮은 상태에서 Odom과 Lidar의 딜레이가 발생하는 현상이 있습니다.
최신 버전의 TurtleBot3 OpenCR 펌웨어로 업데이트 후 동일한 증상이 발생하는지 확인부탁드립니다.
감사합니다.
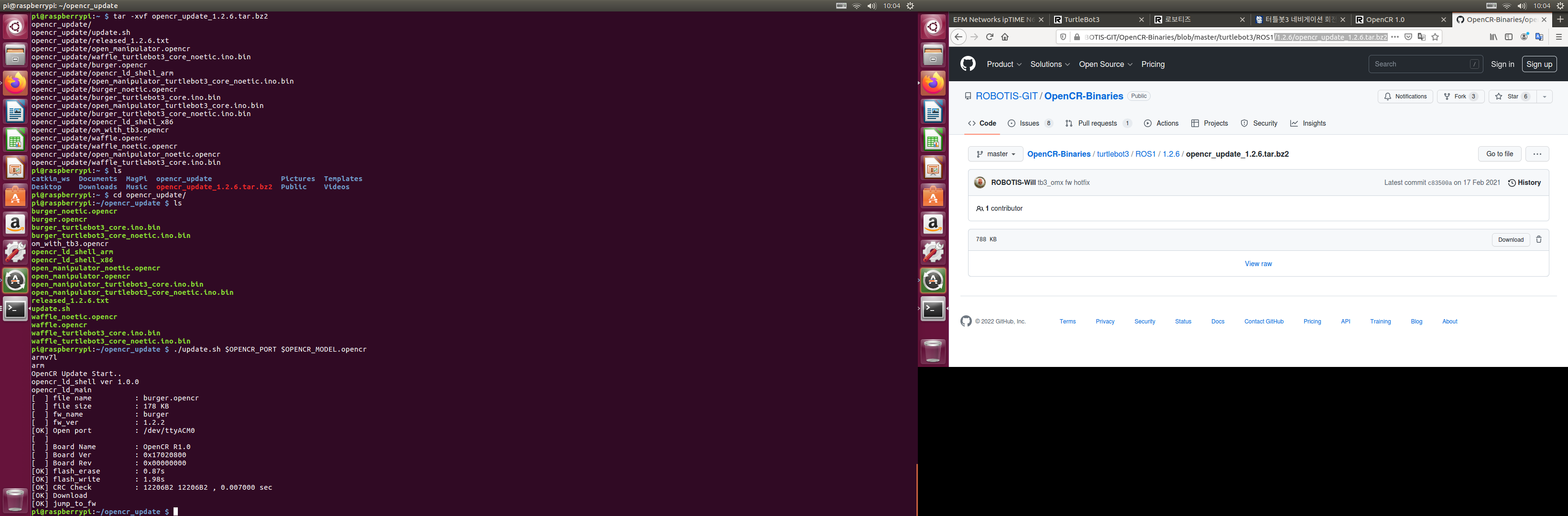
안녕하세요. 우선 정보 감사합니다.
현재 github에서 OpenCR 최신버전은 1.2.6버전으로 확인되었고 제일 최신버전으로 다운을 받았는데 update를 실행하면 fw_ver이 1.2.2로 표시가 됩니다.
이점이 문제가 되는 걸까요?