Hi everyone, I’m implementing a torque controller with Dynamixel servos XM430-W350 in a ROS node (C++). I’ve seen there is only position, velocity, current and pwm control. How can I implement the torque controller?
I suppose with Current controller. How can I know the linear relation between current and torque? I’ve seen in the servo e-manual and the constant is not specified.
The relationship between torque and current is shown on the NT graph on the eManual page.
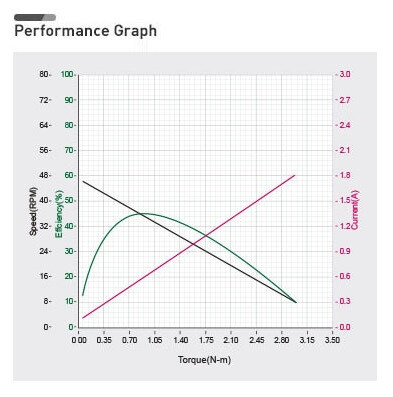
You can see the amount of torque generated at a given current, as well as the unloaded RPM and level of efficency.