Issue:
Hello guys,
I am using the dynamixel motor XH540-V150-R to rotate a plate. The motor and plate are coupled by gears.
I am having a issue where the motor is constantly trying to readjust its position when the actual position is good enough (present position is shifting between 0/1 pulse different than target position). In this scenario the motor has just stopped moving and should be done adjusting its position. The adjusting/vibrating will keep on going forever.
Please see the graph below:
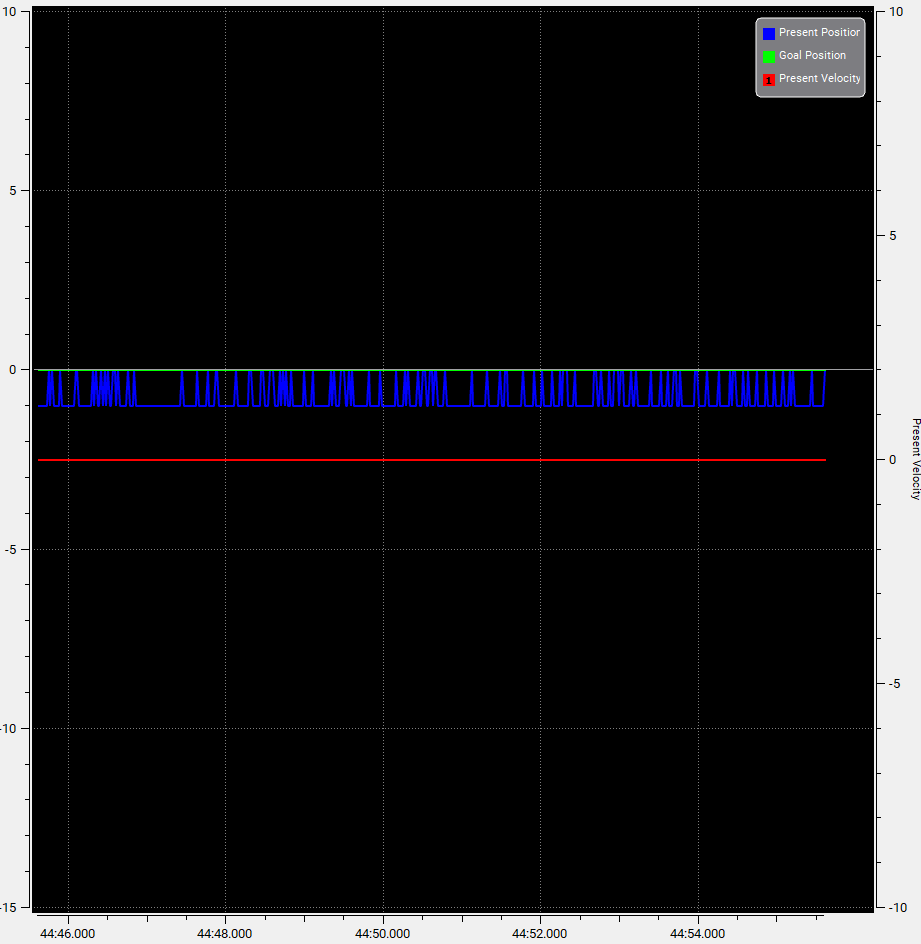
The constant readjusting of the position makes a bad noise and I don’t think it is good for the motor.
Please note: I have already optimized the PID settings and the positioning cannot get better than this. There is a heavy weight that needs to be turned by the motor.
My question: is there any setting to stop the motor from readjusting e.g. after a certain threshold/time? I cannot find a setting that’s useful for this.
Please advise and thanks in advance,
DYNAMIXEL Servo:
XH540-V150-R
DYNAMIXEL Controller:
Dynamixel is controlled by a Beckhoff PLC with an RS485 interface.
Dynamixel operating mode: current-based Position Control Mode
Software Interface:
Beckhoff CoDeSys, Dynamixel Wizard 2.0