안녕하세요.
환경: 윈도우11 wsl2(Ubuntu18.04), U2D2
OpenManipulator-X를 구입 후, 6dof로 업그레이드 하기 위해서 SARA 모델을 만들고 있습니다.
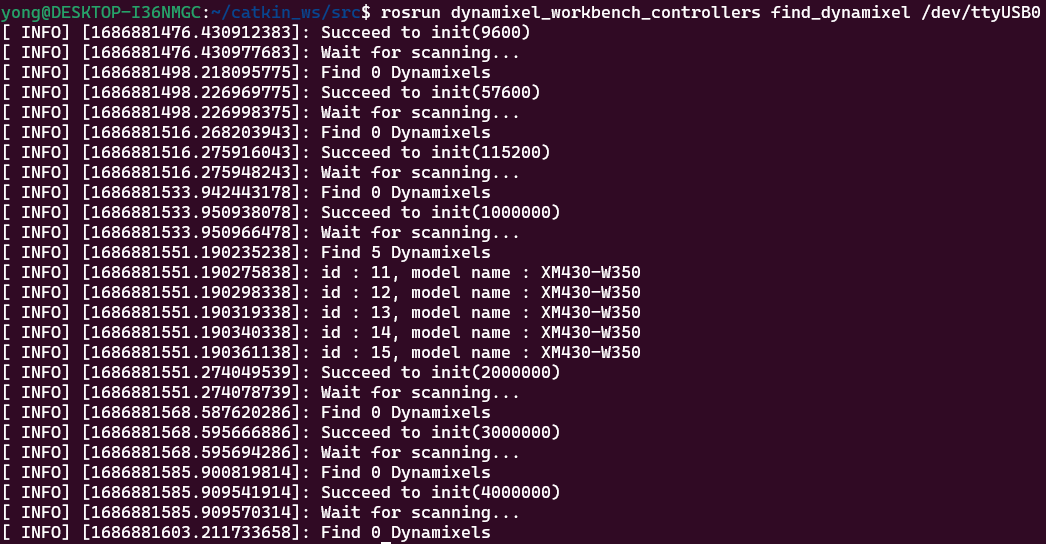
다이나믹셀이 인식 되는지 확인하기 위해 아래 커맨드를 입력했는데, OpenManipulator-X의 구성품인 id: 11~15까지의 5개 다이나믹셀만 인식이 되고, 새로 구입해서 추가한 2개의 다이나믹셀은 인식이 안 됩니다.
감사합니다.
안녕하세요.
환경: 윈도우11 wsl2(Ubuntu18.04), U2D2
OpenManipulator-X를 구입 후, 6dof로 업그레이드 하기 위해서 SARA 모델을 만들고 있습니다.
다이나믹셀이 인식 되는지 확인하기 위해 아래 커맨드를 입력했는데, OpenManipulator-X의 구성품인 id: 11~15까지의 5개 다이나믹셀만 인식이 되고, 새로 구입해서 추가한 2개의 다이나믹셀은 인식이 안 됩니다.
감사합니다.
안녕하세요.
어떤 다이나믹셀을 사용하시나요?
또한, 해당 다이나믹셀의 id는 몇 번으로 변경 하셨나요?
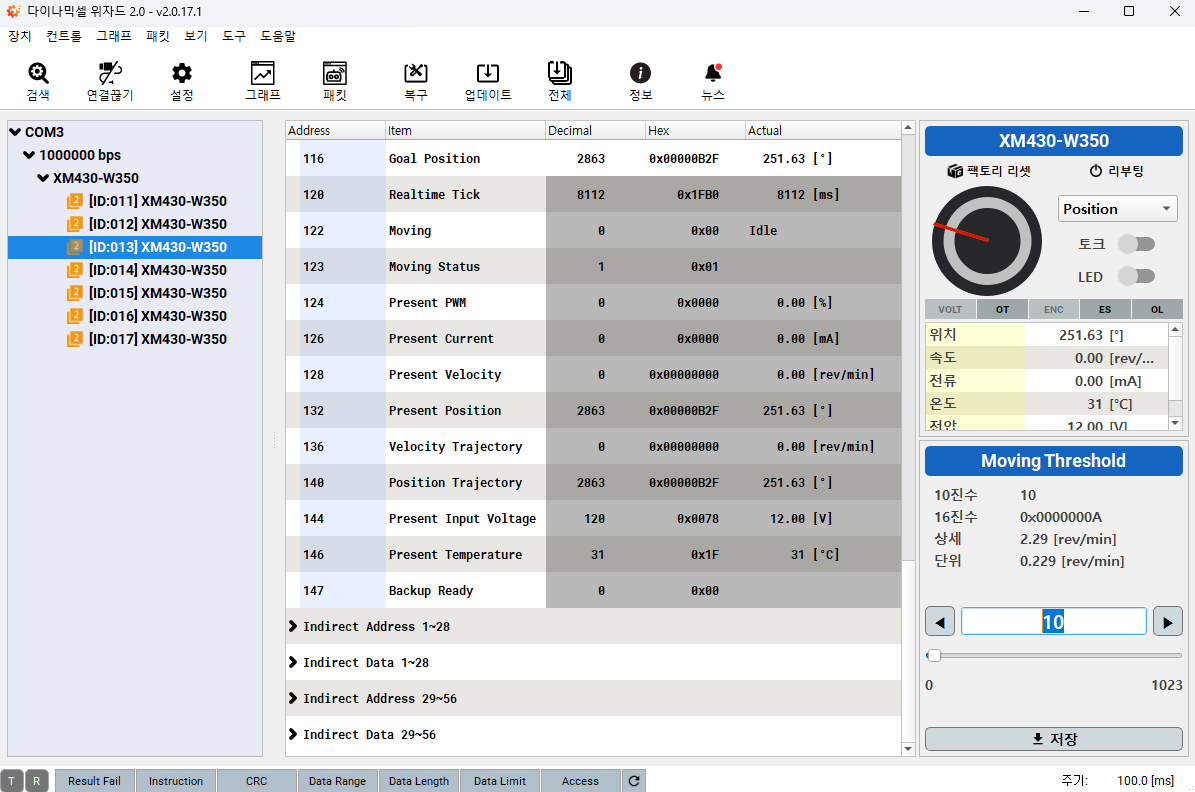
다이나믹셀 위자드 2.0에서 7개가 검색이 되는지 확인을 해주세요.
안녕하세요.
빠른 해결을 위해서 SARA 모델을 가지고 로보티즈에 방문드리고 싶은데요, 혹시 연락처를 여쭤봐도 될까요?
곤란하시다면 아래 메일로 메일을 보내주시면 정말 감사할게요.
seyong@hanyang.ac.kr
감사합니다.
새로 구입한 Dynamixel 2개의 baudrate를 1,000,000으로 변경하고, id를 16과 17으로 변경했습니다.
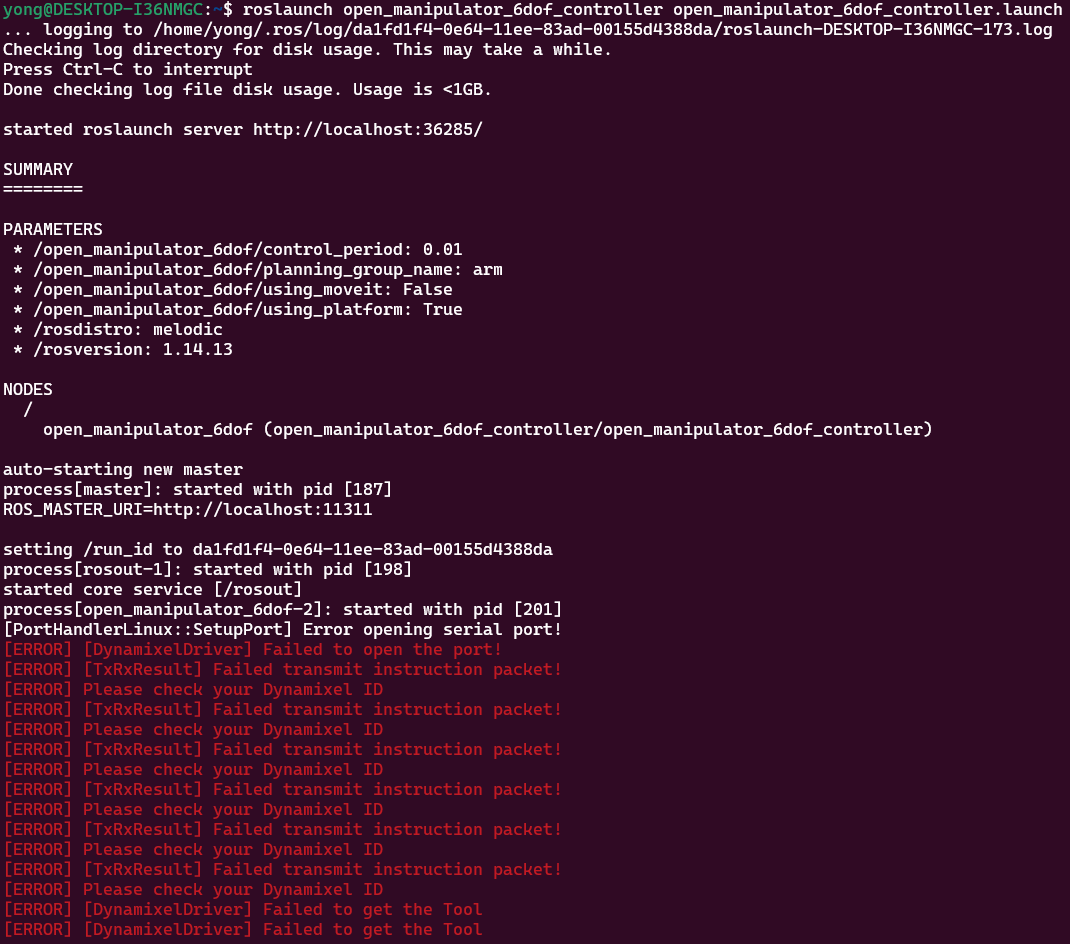
그런데 아래 깃헙 레포 커맨드를 참조해서 controller를 launch해보려는데 에러가 나네요,
(커맨드: $ roslaunch open_manipulator_6dof_controller open_manipulator_6dof_controller.launch)
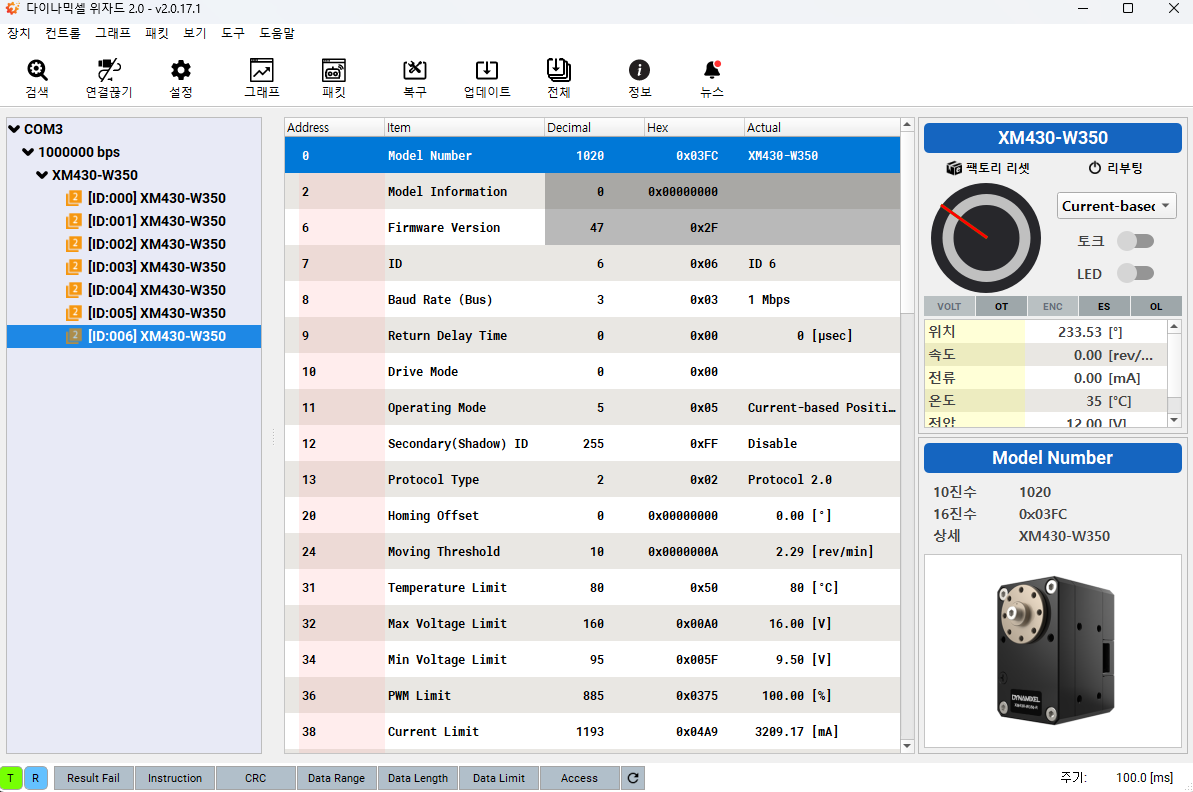
해당 예제는 id 0 ~ 6을 사용합니다. (id 6 - 그리퍼)
id를 변경 후 확인해주세요.
안녕하세요.
아 네 id를 0~6으로 변경했는데, 여전히 동일한 오류가 나고 있는데요
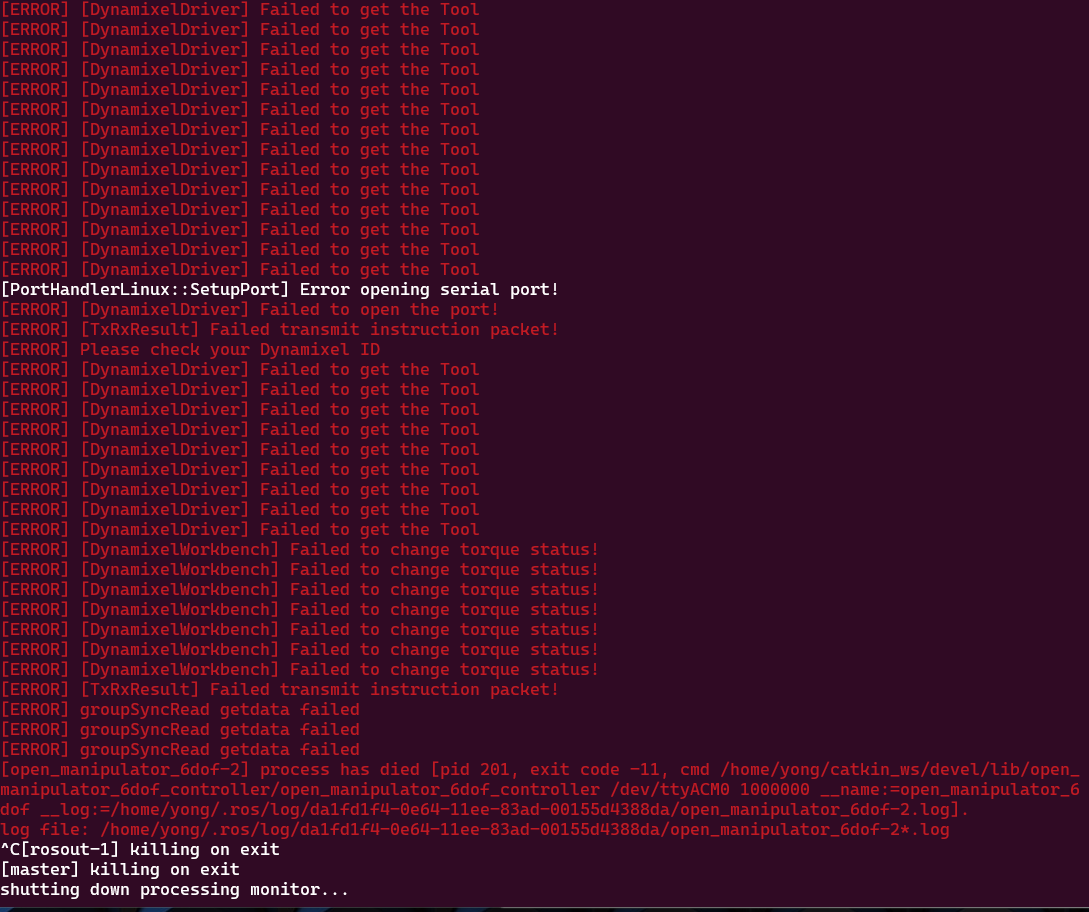
저희는 U2D2(/dev/ttyUSB0)를 사용하고 있는데요, 이 깃헙 레포의 커맨드를 치면 /dev/ttyACM0를 사용하는 것 같아요.
/dev/ttyACM0는 OpenCR을 사용할 때 쓰이는 명칭 같은데요,
저희가 OpenCR을 새로 사야할까요? 아니면 코드를 수정해서 cmake를 다시하면 될까요?
직접 토크 on 해서 다이나믹셀이 고정되는지 확인해보면서, world(지지대) 쪽의 다이나믹셀을 id=0으로 시작하고 순차적으로 증가시키면서 다이나믹셀들의 id를 0~5로 설정하고, 그리퍼가 id=6 되도록 세팅 했는데요
open_manipulator_friends/open_manipulator_6dof_controller/launch/open_manipulator_6dof_controller.launch 에서 '/dev/ttyACM0’를 '/dev/ttyUSB0’로 바꿔서 다시 catkin build 해봐도 에러가 납니다. ![]()
로보티즈에 가서 선생님 뵙고 배우고 싶은데요!
언제 어디로 방문드리면 될까요?
제 메일은 seyong@hanyang.ac.kr 입니다.
따로 예제 관련으로 방문 기술지원 및 교육을 해드리고 있지 않습니다. 이점 양해 부탁드립니다.
log값을 확인하여 어떤 오류 인지 확인을 해보셔야 할 것같습니다.