YRA Team Description 2010.pdf (439.4 KB)
Abstract
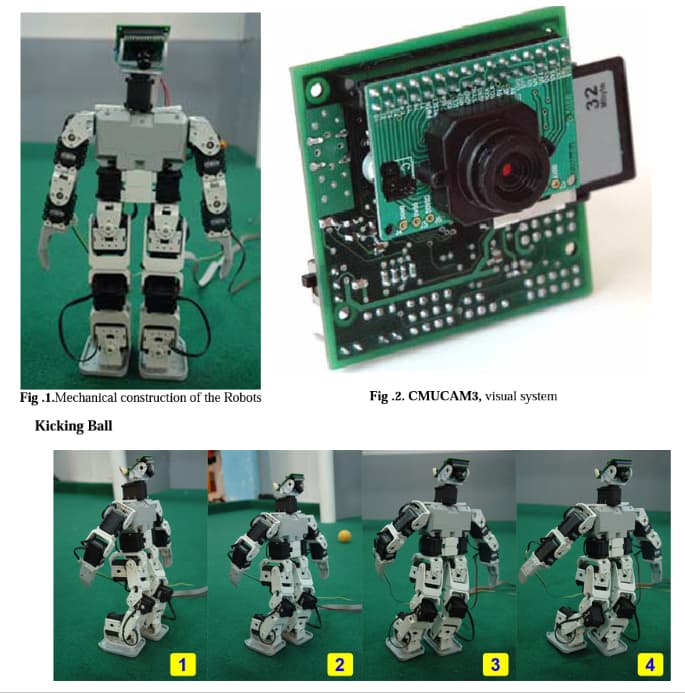
This document describes hardware and software of the robotsdeveloped by the “YRAman” Team for the RoboCupsoccer kid-size competitions to be heldin Singapore 2010 .The system we developed has some features .They are high mobility, strong kicks, well-designed control system, position estimation by one camera and user-friendly interface .The robot has 19 actuated degrees of freedom based on Dynamixel AX12 servos .Central Processing, including Machine vision, Planning and control is performed using a Gumstixverdex XL6Pwhich is an ARM based 600MHz platform .This paper explains the software and hardware used for the robot as well as control and stabilization methods developed by our team.
This academic paper features our DYNAMIXEL AX-12 all-in-one smart actuators
All credit goes to Mohammad Hossein Kargar, Meisam Bakhshi, Ghazanfar Zahedi, Ehsan Ghasemi, Mohsen Mollahosseini, and Mohammadreza Jenabzadeh of Yazd Robotic Association, Islamic AZAD University YAZD Branch, Safaeieh, YAZD, IRAN