안녕하세요.
터틀봇3버거를 이용해서 SLAM기능을 사용하고자 하는데 계속 에러가 발생해서 문의 드립니다.
e-Manual에 Quick Start Guide의 ubuntu 22.04와 ros2 humble 버전 사용해서 설명 그대로 다 입력했습니다.
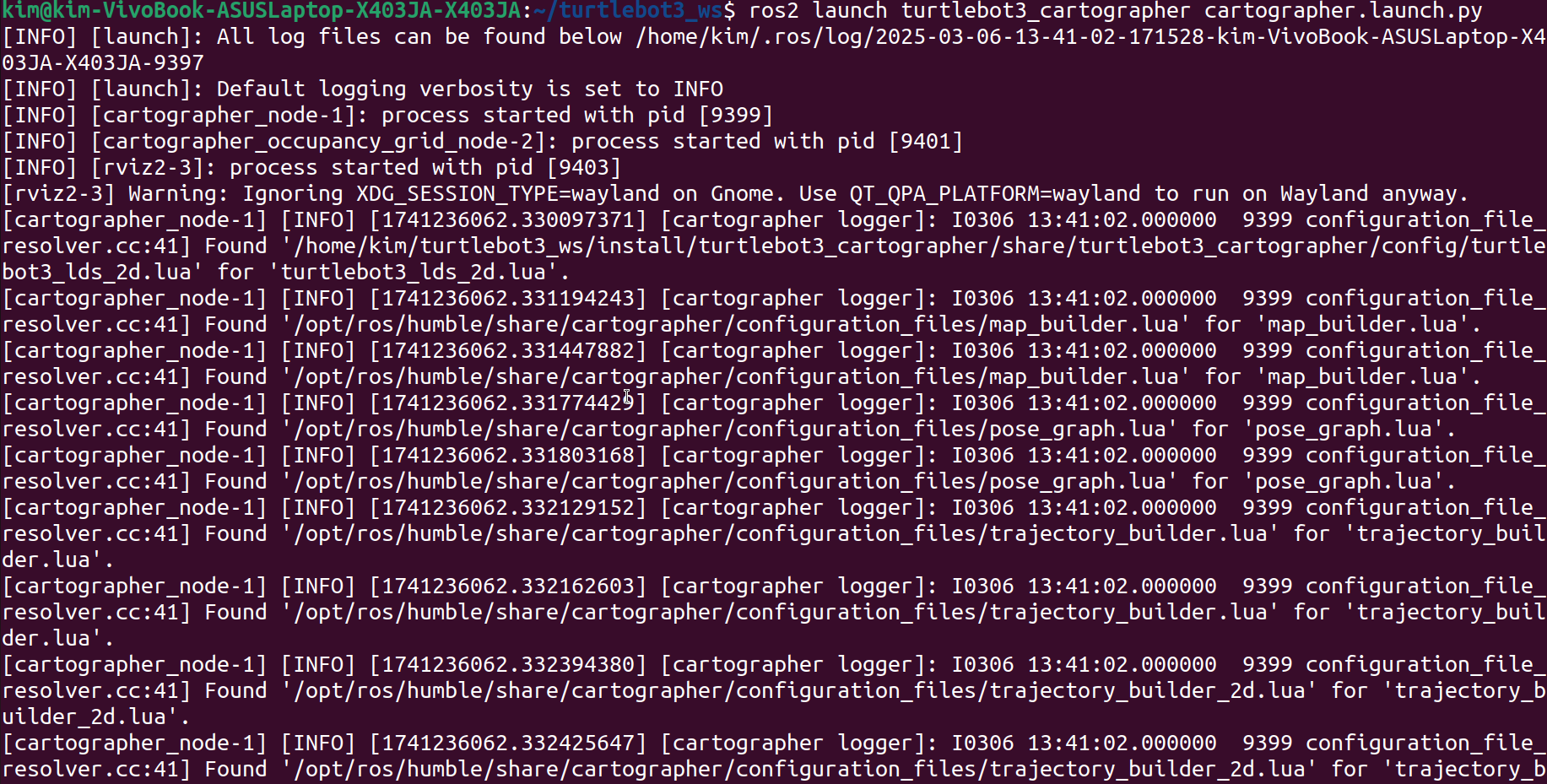
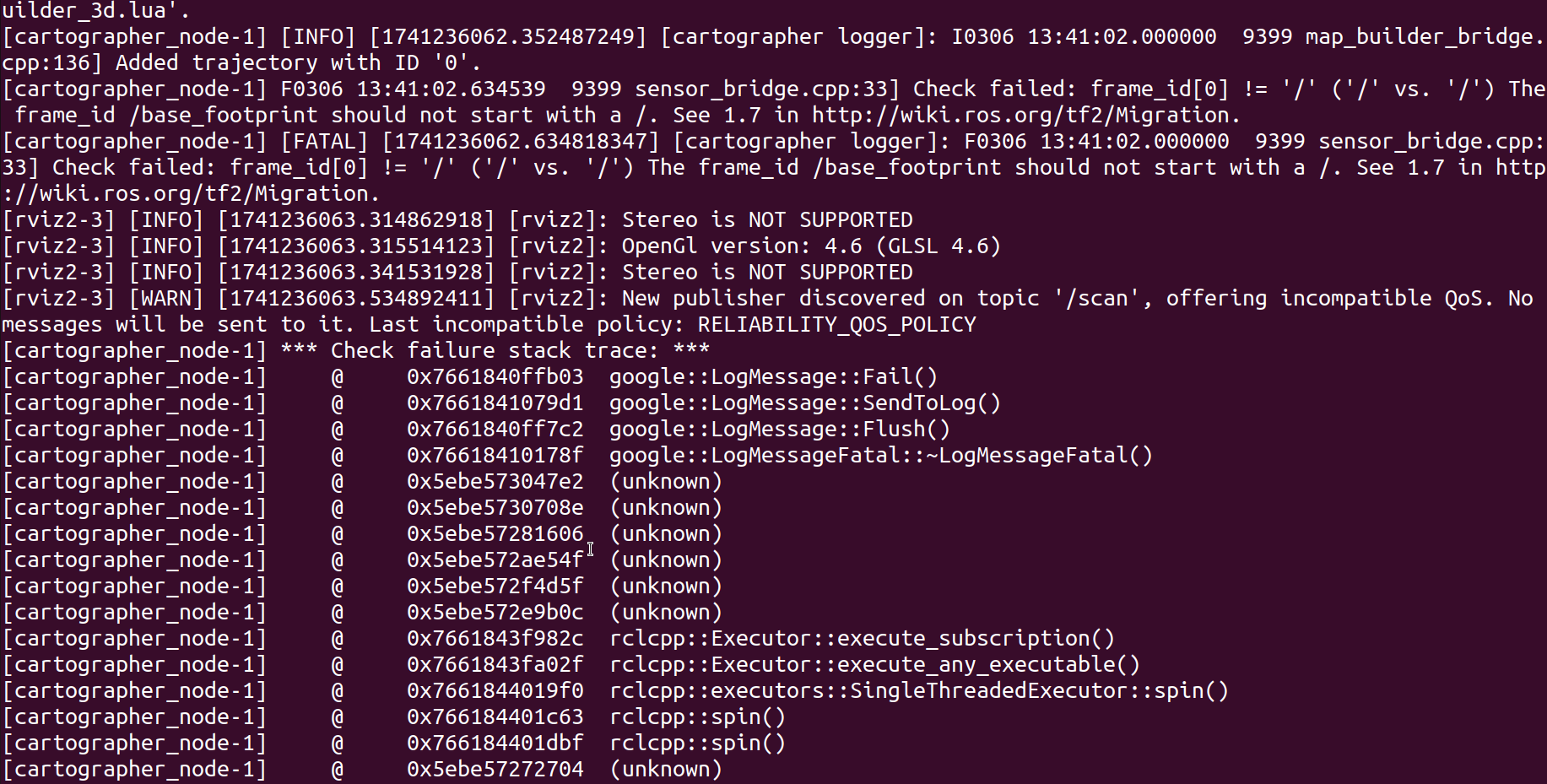
e-Manual 4.1의 '$ ros2 launch turtlebot3_bringup robot.launch.py’를 입력하면 다음과 같이 에러가 발생합니다.
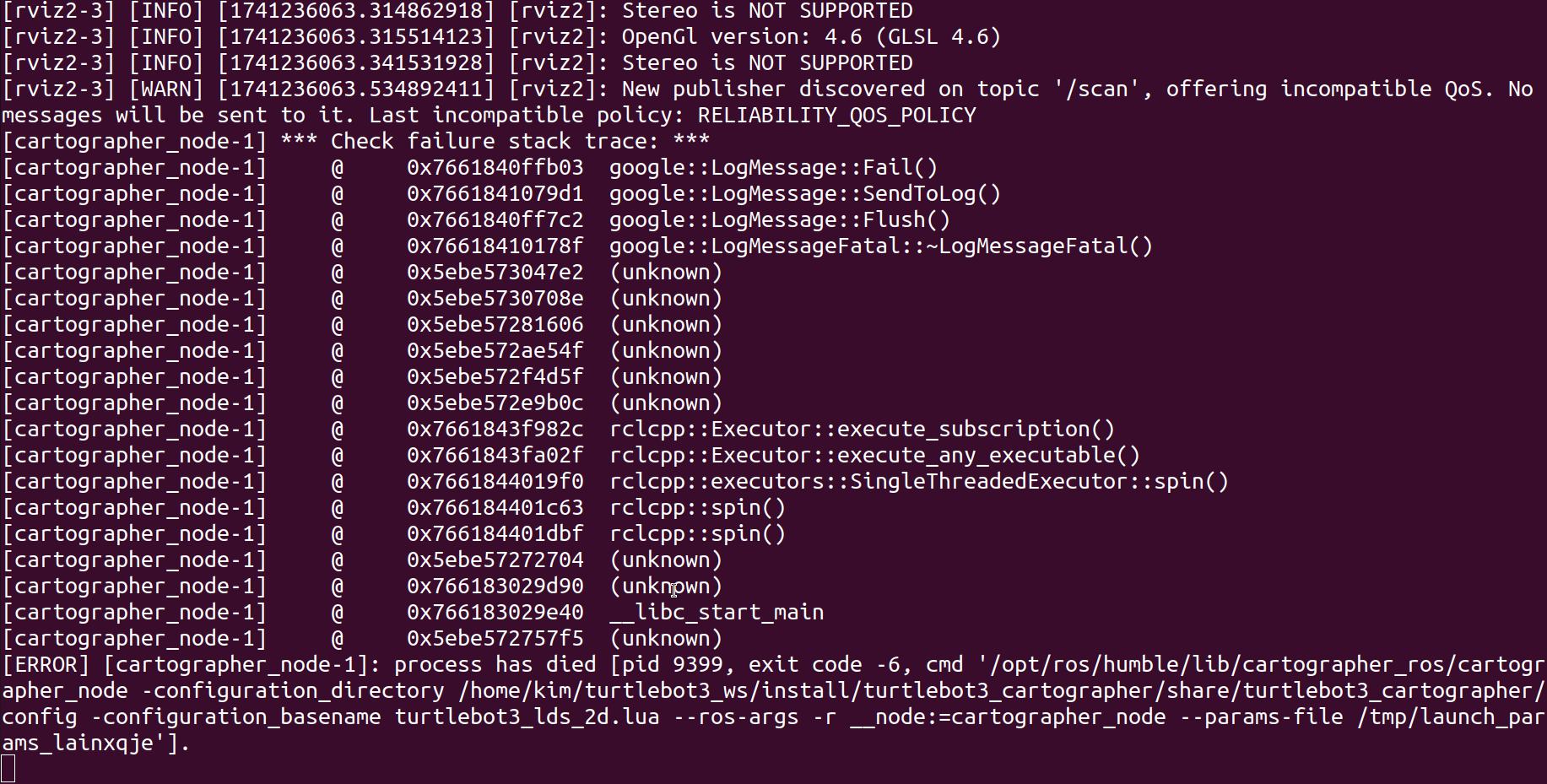
[ERROR] [cartographer_node-1]: process has died [pid 11792, exit code -6, cmd ‘/opt/ros/humble/lib/cartographer_ros/cartographer_node -configuration_directory /home/kim/turtlebot3_ws/install/turtlebot3_cartographer/share/turtlebot3_cartographer/config -configuration_basename turtlebot3_lds_2d.lua --ros-args -r __node:=cartographer_node --params-file /tmp/launch_params_prasogvn’].
혹시나해서 remote pc와 라즈베리파이를 초기화하고 처음부터 다시 시작해서 했는데도 같은 에러가 발생해서 문의드립니다.