Abstract—
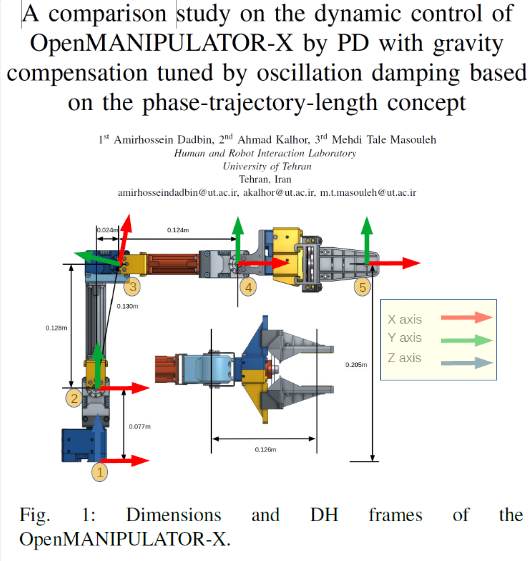
In this paper, the dynamic control of a 4-DOF
serial manipulator, the so-called OpenMANIPULATOR-x, is
investigated by means of different performance indices, including,
among others, oscillation damping. To do so, the kinematics and
dynamics equations are obtained from a systematic approach
where both models are verified by simulating the under study
robot in Simscape. The stability of the applied controller, which
is a PD with gravity compensation controller, is investigated,
and it reveals that it is asymptotically stable. Thereafter, the
coefficient of the latter PD controller is first optimized by means
of different performance indices, namely, IAE, ISE, ITAE, ITSE
then, a new criterion called oscillation damping, which is based on
the optimization of a cost function defined on the phase trajectory
length concept is used in order to evaluate the performance of
the implemented controller. The obtained results revealed that the
step response of the oscillation damping controller eliminates the
overshoot, but it is slower than ones tuned by other performance
indices.
Index Terms—Dynamics, kinematics, OpenMANIPULATORX,
This research paper features our OpenMANIPULATOR-X open source system.
All credit goes to: Amirhossein Dadbin, Professor Ahmad Kalhor, and Professor Medhi Tale Masouleh from the University of Tehran (Human and Robot Interaction Laboratory)
MyEssay (2).pdf (2.0 MB)