A Robotic Hand Surpassing Human Capabilities in Dexterity and Functionality
Abstract
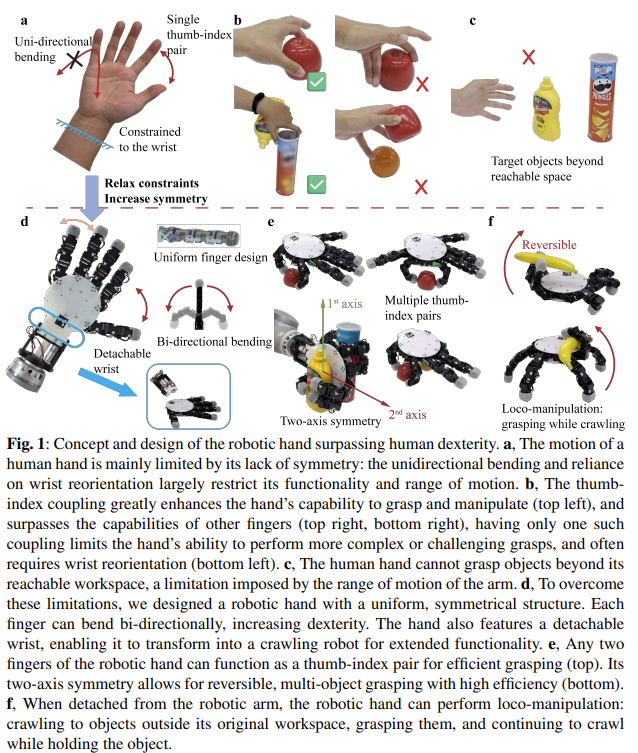
The human hand is often regarded as the pinnacle of dexterity. Yet, its asymmetric shape and unique thumb can actually limit its range of motion. Artificial and robotic hands have often diverged from anthropomorphic designs. Featuring two or three fingers arranged symmetrically, traditional industrial robotic hands were built to maintain balance and simplify manipulation. However, they remain far from achieving human-like dexterity, typically restricted to basic pick-and-place tasks with single objects.
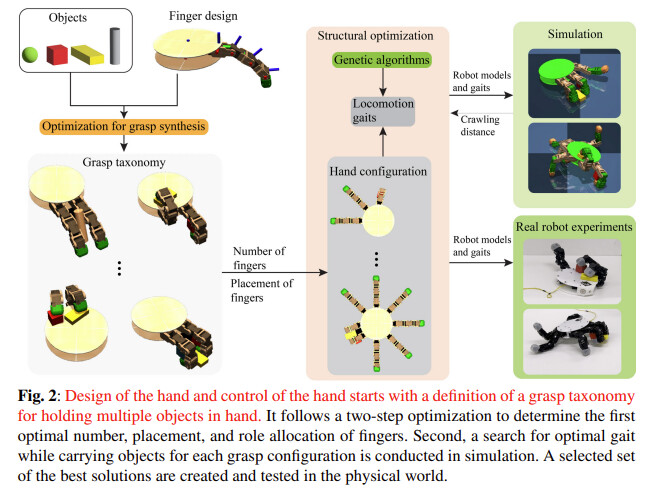
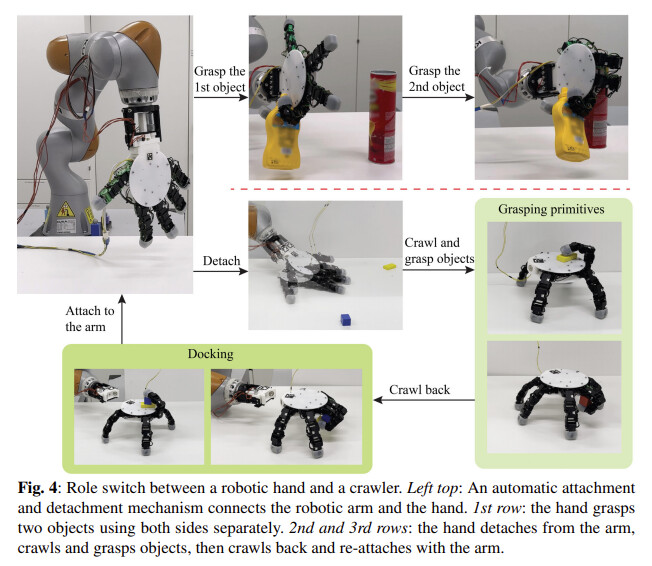
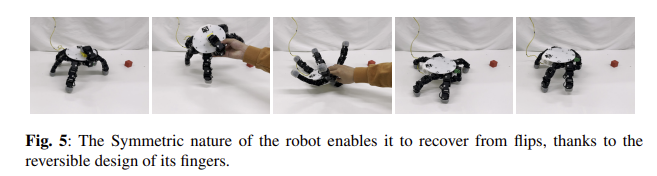
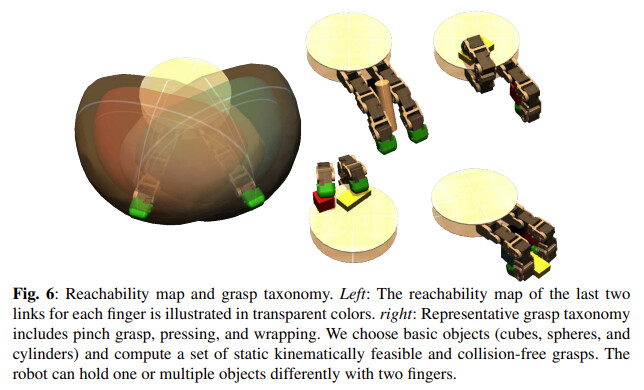
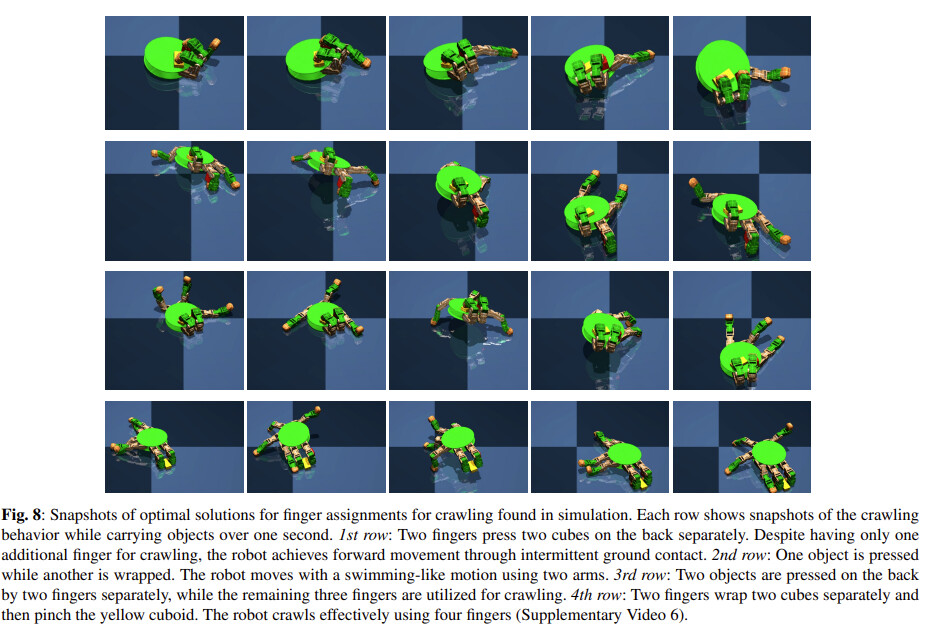
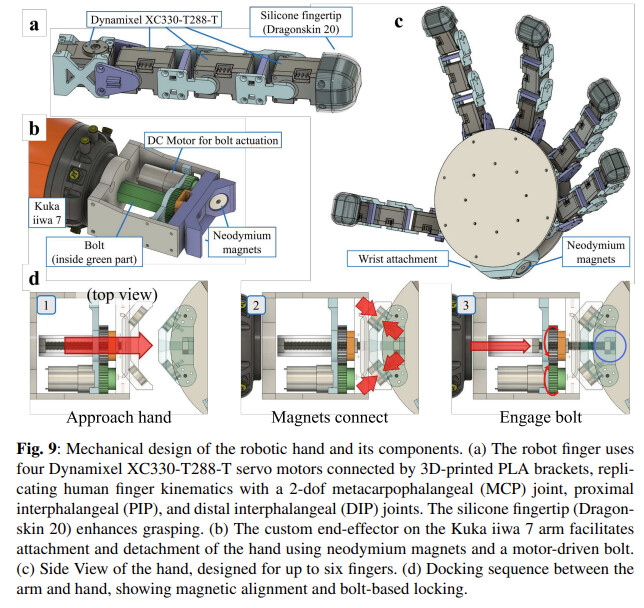
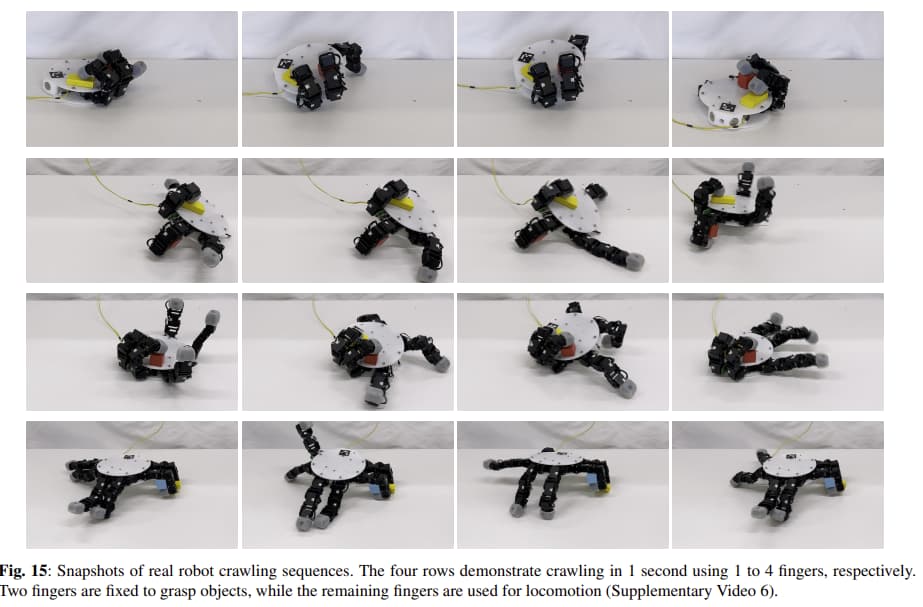
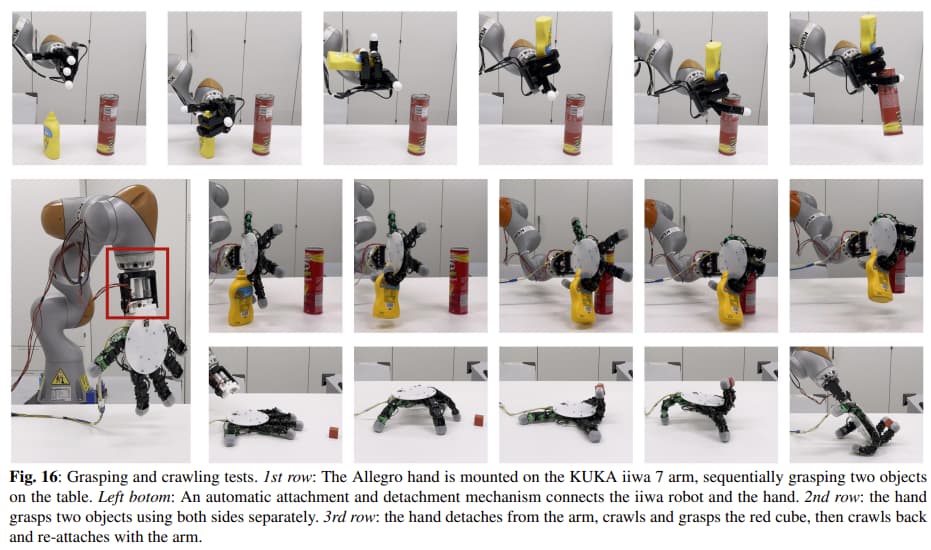
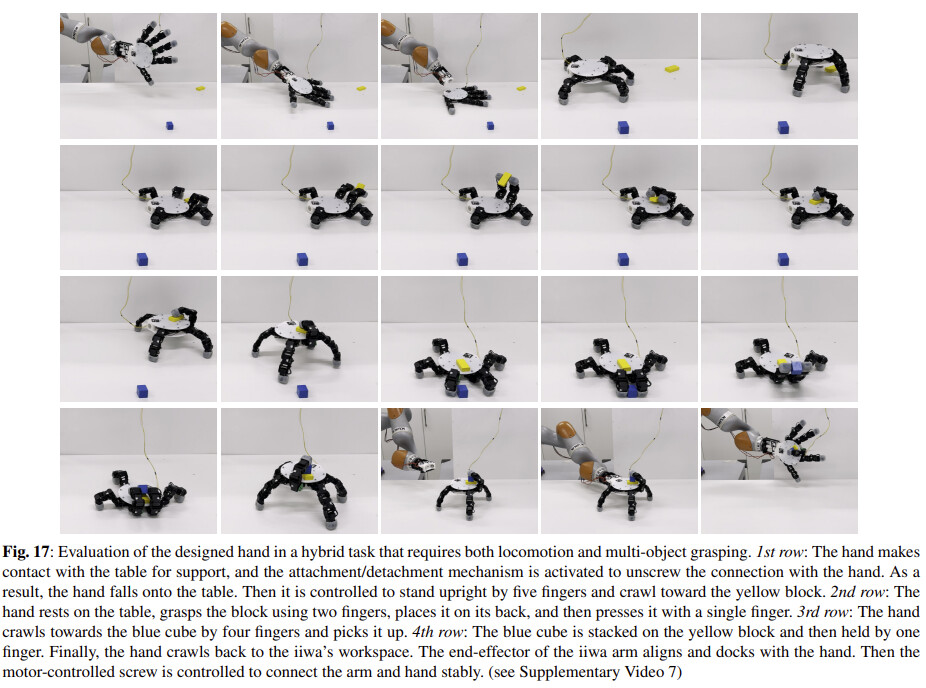
We introduce a reversible robotic hand designed to address these limitations by combining multi-object grasping with crawling locomotion. This hand features an identical-finger, symmetric layout, refined through a layered design process that integrates optimization techniques for exploring diverse grasp configurations with constraint-based methods. This enables the hand to detach from its arm, crawl to collect multiple objects outside its standard reach, and reattach while maintaining a secure grip.
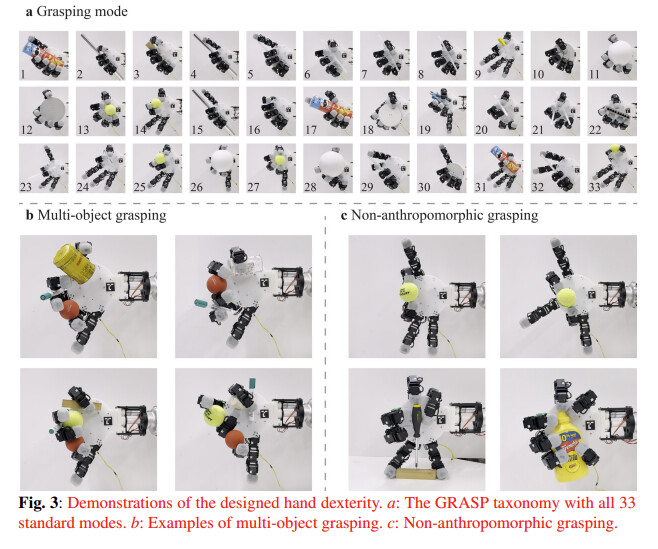
This unified approach enhances conventional manipulation by supporting tasks that exceed the capabilities of both human and traditional robotic hands. It enables operations such as simultaneously grasping multiple items or using one hand to manipulate tools typically requiring two. By blending static manipulation with mobile autonomy, our design offers new avenues for industrial, service, and exploratory robotics.
Keywords: non-anthropomorphic hand, bio-inspired robotics, mobile manipulation, AI-based design and control
Powered by DYNAMIXEL
Full Research Paper: https://infoscience.epfl.ch/entities/publication/cd00e98f-09a9-4ff4-b007-82366cd61bdd
All Credits Go To: Xiao Gao, Kunpeng Yao, Kai Junge, Josie Hughes, Aude Gemma Billard, EPFL and MIT
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn