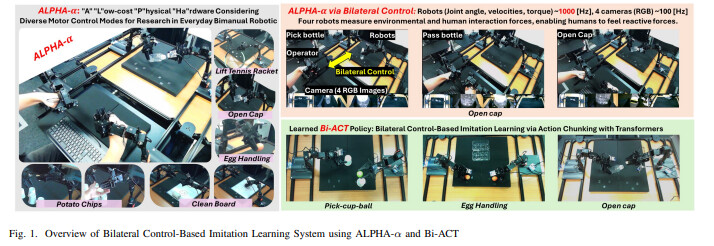
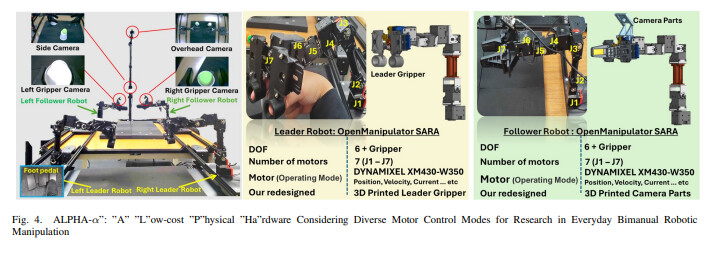
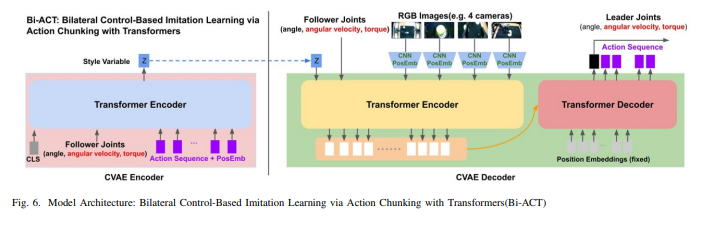
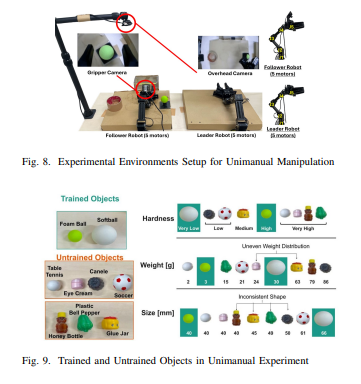
Abstract—Autonomous manipulation in everyday tasks requires flexible action generation to handle complex, diverse real world environments, such as objects with varying hardness and softness. Imitation Learning (IL) enables robots to learn complex tasks from expert demonstrations. However, a lot of existing methods rely on position/unilateral control, leaving challenges in tasks that require force information/control, like carefully grasping fragile or varying-hardness objects. As the need for diverse controls increases, there are demand for low-cost bimanual robots that consider various motor inputs. To address these challenges, we introduce Bilateral Control-Based Imitation Learning via Action Chunking with Transformers(Bi-ACT) and”A” ”L”owcost ”P”hysical ”Ha”rdware Considering Diverse Motor Control Modes for Research in Everyday Bimanual Robotic Manipulation (ALPHA-α). Bi-ACT leverages bilateral control to utilize both position and force information, enhancing the robot’s adaptability to object characteristics such as hardness, shape, and weight. The concept of ALPHA-α is affordability, ease of use, reparability, ease of assembly, and diverse control modes (position, velocity, torque), allowing researchers/developers to freely build control systems using ALPHA-α. In our experiments, we conducted a detailed analysis of Bi-ACT in unimanual manipulation tasks, confirming its superior performance and adaptability compared to Bi-ACT without force control. Based on these results, we applied Bi-ACT to bimanual manipulation tasks using ALPHAα. Experimental results demonstrated high success rates in coordinated bimanual operations across multiple tasks, verifying the effectiveness of our approach in complex real-world scenarios. The effectiveness of the Bi-ACT and ALPHA-α can be seen through comprehensive real-world experiments. Video available at: ALPHA-α and Bi-ACT Are All You Need: Importance of Position and Force Control and Information in Imitation Learning for Unimanual and Bimanual Robotic Manipulation
All credits go to: Masato Kobayashi, Thanpimon Buamanee, Takumi Kobayashi, and Osaka University
Complete Research Page: [2411.09942] ALPHA-$α$ and Bi-ACT Are All You Need: Importance of Position and Force Information/Control for Imitation Learning of Unimanual and Bimanual Robotic Manipulation with Low-Cost System
YouTube Video: https://www.youtube.com/watch?v=6dnBNRZpkx8&t=68s