06/01/25-07/11/25
The BANSHEE UAV research team from the College of Engineering at California State Polytechnic University, Pomona (Cal Poly Pomona) is excited to announce our renewed partnership with ROBOTIS for the summer. This collaboration will center on the integration of ROBOTIS’s advanced Dynamixel technology into our work. We extend our sincere gratitude to ROBOTIS for their invaluable support and invite the community to provide feedback on our developments over the coming months.
This project is being led by Clay Kim and Joshua Carrasco. While we initially planned for biweekly updates, our new leadership team has been focused on establishing a strong foundation for the project since our start in early June. We are now pleased to share a comprehensive update on our progress.
Project Conception: From Idea to Reality
Our initial brainstorming led to two distinct project ideas:
- Crane-like Vehicle: A remote-controlled car base equipped with the ROBOTIS OpenManipulator-X platform.

Figure 1.1
- Bipedal Humanoid Robot: A humanoid robot powered by multiple ROBOTIS Dynamixel XM motors.
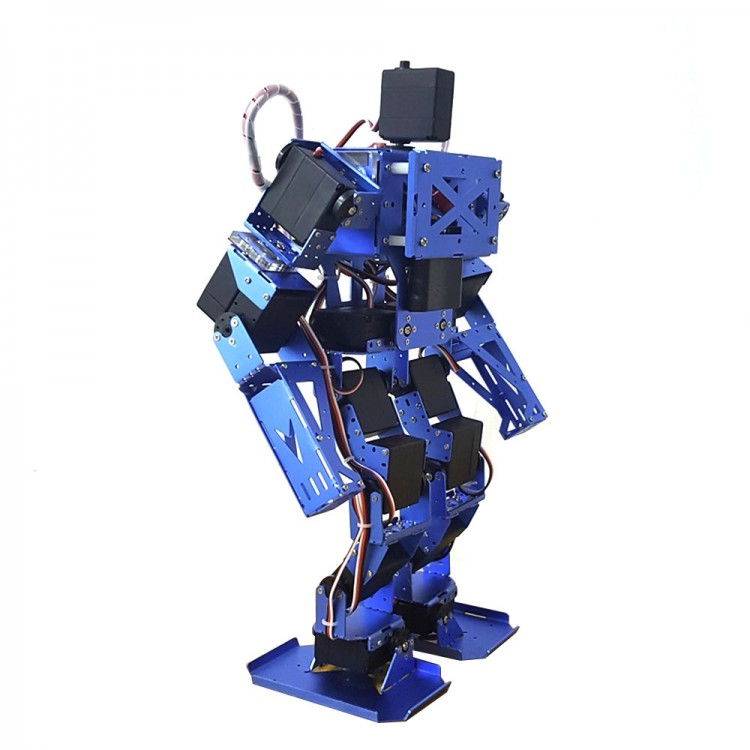
Figure 1.2
After consulting with Jonathon, a representative from ROBOTIS, we decided to pursue option 1, the crane-like vehicle. This project serves as a compelling proof of concept with real-world applications.
Project Goal: Autonomous Object Manipulation
Our primary objective is to develop a fully autonomous RC vehicle with an integrated robotic arm. The vehicle will utilize LiDAR for navigation and a camera mounted on the arm for machine learning-based object recognition and manipulation. While our timeframe limits the scope of this project, we believe it has the potential to be applied in scenarios such as automating warehouse and construction tasks.
Team Structure and Initial Progress
We have assembled a talented team of 10 students, divided into three specialized subteams: Mechanical, Electrical, and Software.
Mechanical Team (4 members):
- Researching a system design that accommodates LiPo batteries, a Jetson Nano microcontroller, motors, and the robotic arm.
- Collaborating with the Electrical Team to finalize the parts list.
- Designing a custom chassis that meets all design constraints.
Electrical Team (3 members):
- Evaluating ESP-NOW and nRF communication protocols for the remote controller.
- Researching power distribution and LiPo battery safety.
- Determining the necessary components for optimal power distribution.
Software Team (3 members):
- Installing ROS2 on the Jetson Nano microcontroller.
- Researching inverse kinematics for precise control of the ROBOTIS motors.
- Investigating SLAM (Simultaneous Localization and Mapping) with LiDAR for autonomous navigation.
- Developing ESP communication for wireless remote control during the initial testing phase.
Moving Forward
Following the initial phases of team integration, preliminary research, and component procurement, the project has progressed to focused work on more detailed and specific technical aspects of the project.
A significant anticipated challenge is the initial assembly of the RC car platform. Precision is critical, as any errors during this phase could lead to considerable project delays. To mitigate this risk, team leads will provide closer oversight during the assembly process. They will take a more direct role in supervising the sub-teams to ensure every component is integrated correctly and all work is performed to specification.
Over the course of the month of June the team has made significant progress across all sub-teams. This report outlines the key accomplishments, tasks undertaken, and challenges encountered during this period.
- Mechanical Team: The mechanical team has successfully developed a detailed CAD model for the first layer of the RC car chassis, shown in Figure 2.1. Concurrently, they have designed several 3D-printed components, that can be seen in Figure 2.2-2.3, to enhance the stability of the robotic arm.
- Electrical Team: The electrical team focused on critical power and control systems. They have completed the design for the custom PCBs for power management, shown in Figure 2.4. Additionally, they have designed a remote controller, which will provide integrated control over both the RC car and the robotic arm.
- Software Team: The software team has been configuring the Jetson Nano microprocessor, the central processing unit for the project. This foundational work is crucial for the future implementation of the robotic arm’s inverse kinematics, the integration of the custom remote controller’s functionality, and the autonomous navigation for ROS2 SLAM.

Figure 2.1 CAD Model first chassis layer
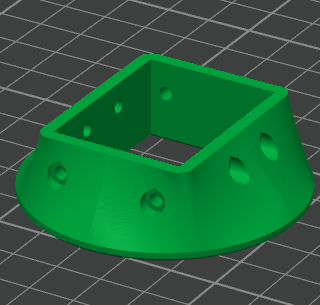

Figure 2.2-2.3 3D printed mounting bracket
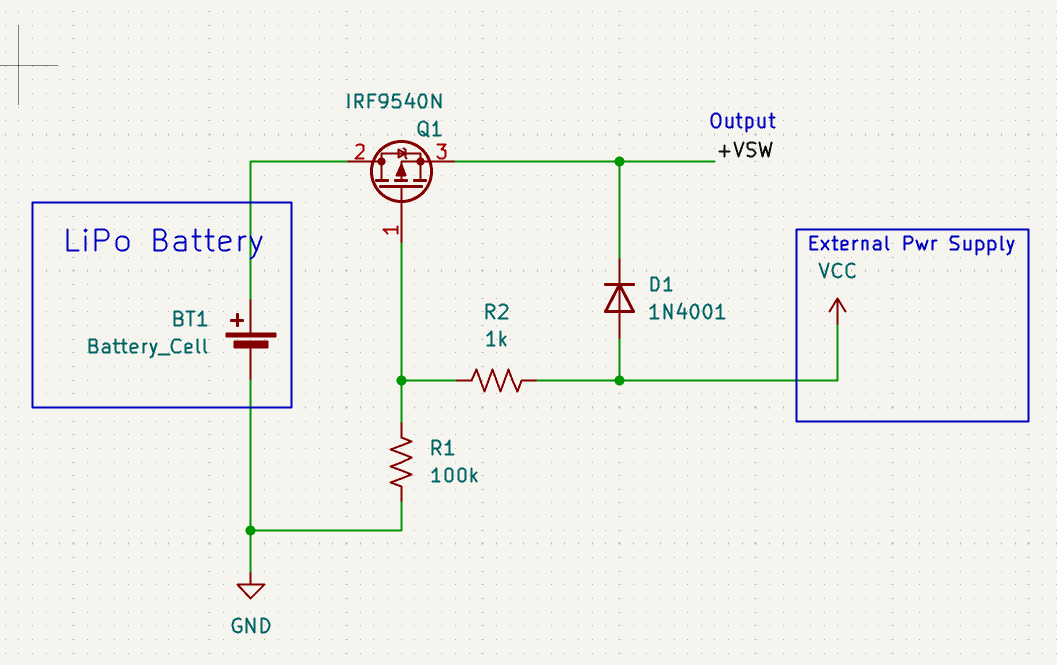
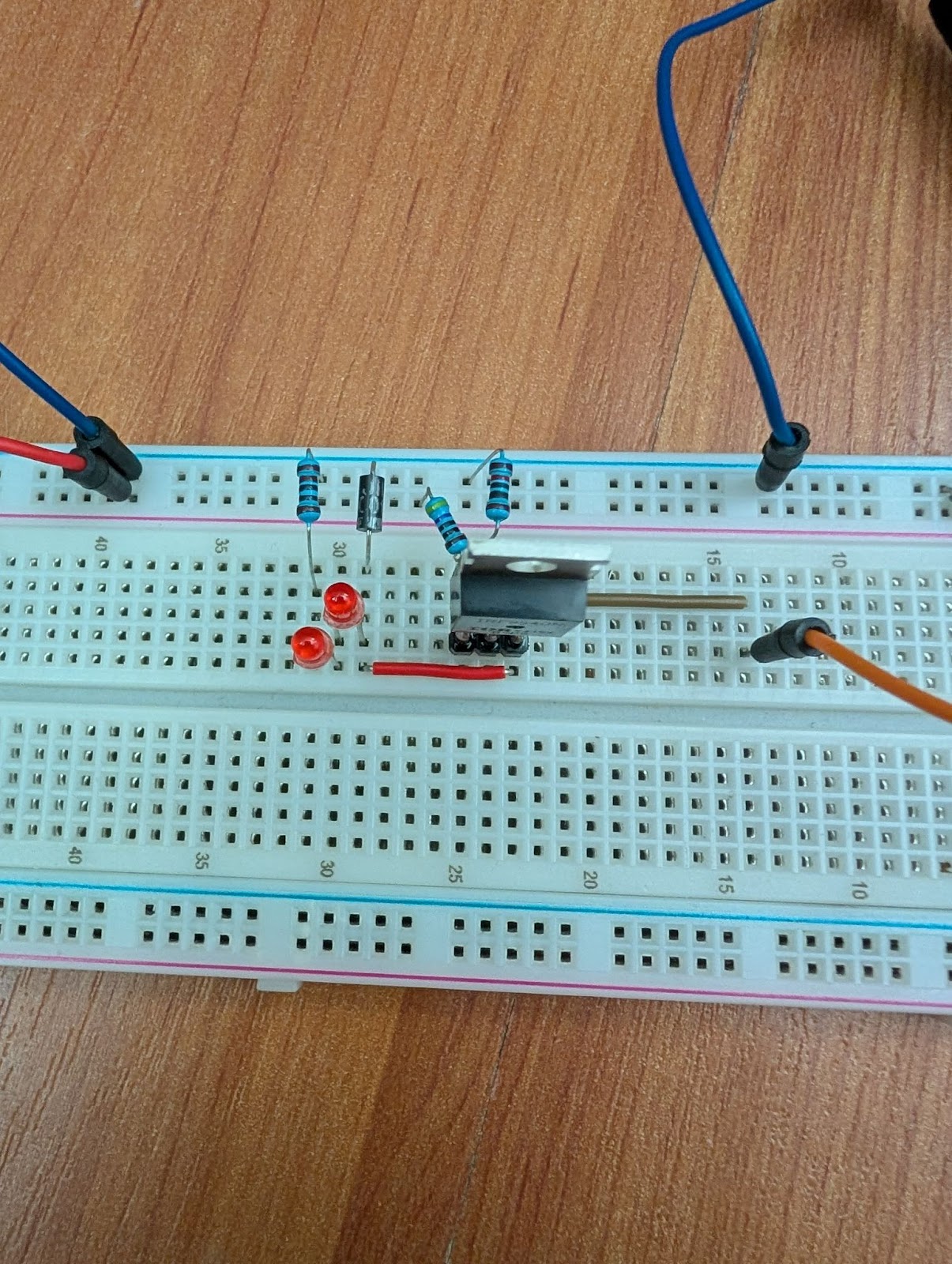
Figure 2.4 Power path circuit diagram Figure 2.5 Prototype circuit