CAFEs: Cable-driven Collaborative Floating End-Effectors for Agriculture Applications
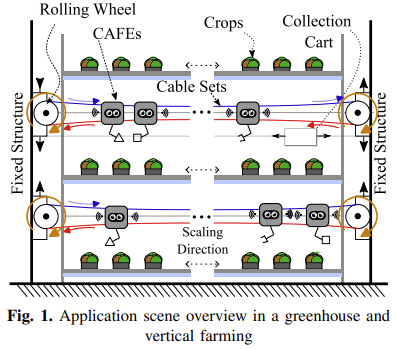
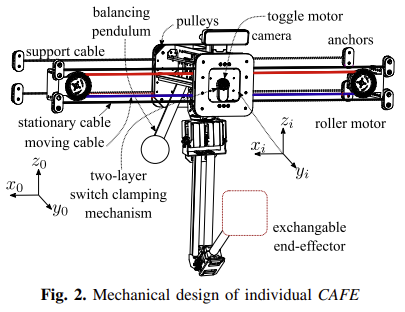
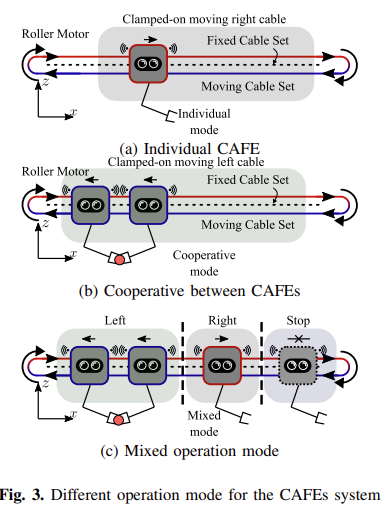
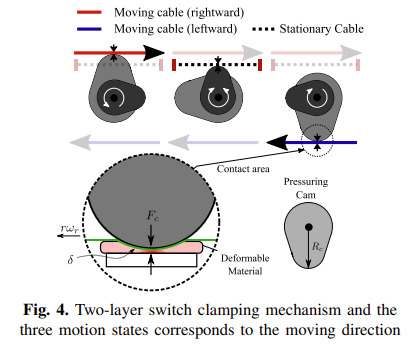
Abstract— CAFEs (Collaborative Agricultural Floating Endeffectors) is a new robot design and control approach to automating large-scale agricultural tasks. Based upon a cable driven robot architecture, by sharing the same roller-driven cable set with modular robotic arms, a fast-switching clamping mechanism allows each CAFE to clamp onto or release from the moving cables, enabling both independent and synchronized movement across the workspace. The methods developed to enable this system include the mechanical design, precise position control and a dynamic model for the spring-mass liked system, ensuring accurate and stable movement of the robotic arms. The system’s scalability is further explored by studying the tension and sag in the cables to maintain performance as more robotic arms are deployed. Experimental and simulation results demonstrate the system’s effectiveness in tasks including pick and-place showing its potential to contribute to agricultural automation.


Powered by DYNAMIXEL
All Credits Go To: Hung Hon Cheng and Josie Hughes
Full Research Paper: https://arxiv.org/pdf/2503.00514
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn