Control_of_IIT_KGP_Humanoid_using_ROS.pdf (2.8 MB)
ABSTRACT
Robotics is an emerging field of science which has a wide variety of applications in many disciplines. In this field of science many robots are designed and operated using different types of frameworks. One such similar framework is ROS (Robotic Operating System). ROS is a meta operating system that supports various other frameworks. ROS supports many sensors like 2d range finders, 3d sensors, cameras and hardware like joysticks, servo motors, Lego NXT etc. One such servo that can be handled using ROS is dynamixel servo. We can also handle these servos using some other platforms but ROS provides simple ways of communications with the servos. Humanoid at IIT KGP, India is made up of many such dynamixel servos. So using ROS is the best way to maneuver the humanoid. The present work focuses on giving the data that is generated from the human motion to the humanoid using ROS. It also concentrates on the consistency of humanoid motion. The result of this work can be helpful in implementing various gaits on the humanoid. The autonomous level of the humanoid can also be enhanced which provides the facility to avail the humanoid in real-time applications.
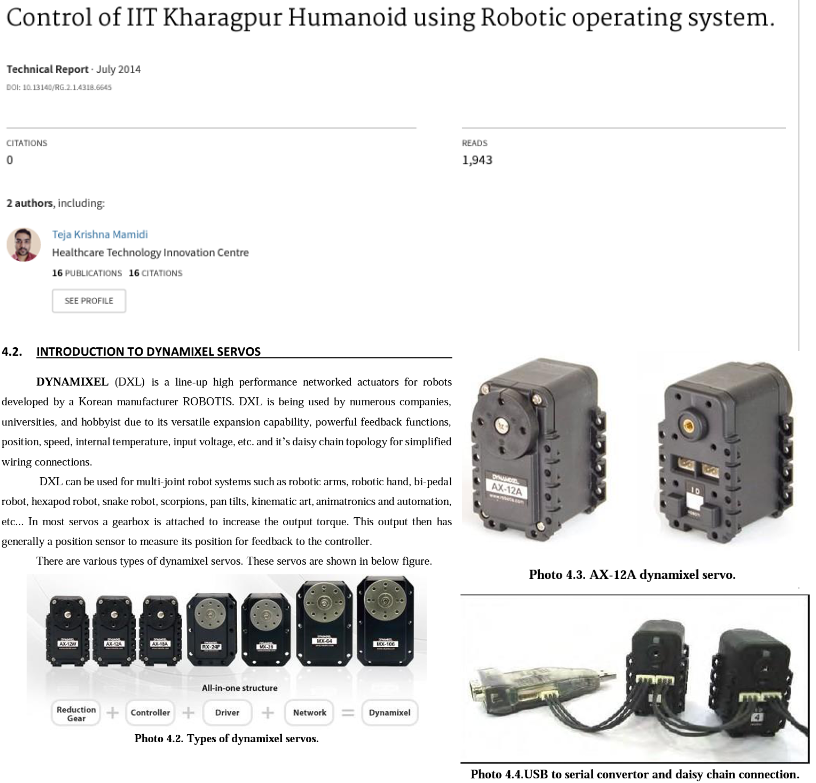
This academic paper features our DYNAMIXEL AX-12A, RX-64, and EX-106 all-in-one smart actuators
All credit goes to: M. Teja Krishna and G. Vinod, under the guidance of Professor C.S. Kumar in partial fulfillment of Summer internship for the award of the degree of BACHELOR OF TECHNOLOGY IN MECHANICAL ENGINEERING, RGUKT NUZVID Campus Rajiv, Gandhi University of Knowledge Technologies