MIT.pdf (3.5 MB)
Abstract
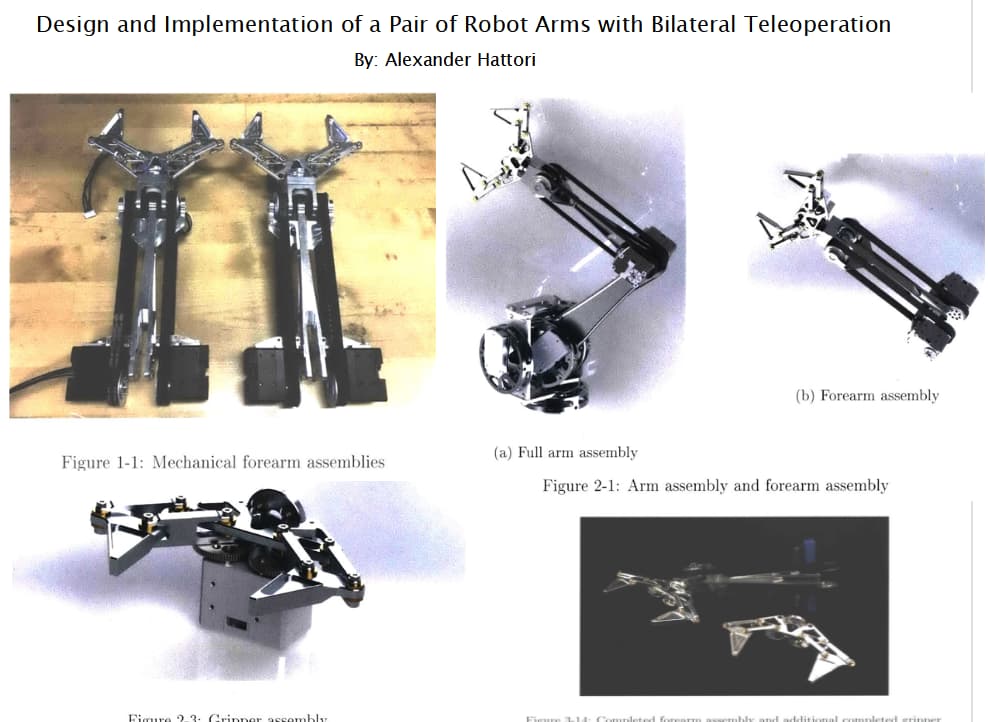
Modern robotics has progressed in the manufacturing industry so that many manual labor tasks in assembly lines can be automated by robots with high speed and high positional accuracy. However, these robots typically cannot perform tasks that require perception or disturbance rejection. Humans are still needed in factories due to their innate ability to understand situations and react accordingly. Teleoperated robots can allow human perception to be combined with the dexterity and safety of a robot as long as the user interface and controls are carefully designed to avoid hindering the operator. Force feedback bilateral teleoperation is one method for providing users with an intuitive user interface and feedback. This thesis documents the design, construction, and implementation of a pair of bilateral teleoperated robotic forearms, each consisting of a 2 degree of freedom wrist, and a gripper. The forearm uses commercial off the shelf actuators in order to keep cost and additional development time low, while also testing the feasibility of using non-custom actuators. Development of the forearms included design and manufacturing of the mechanical assemblies, implementation of high-speed communication protocol, and tuning of control parameters.
Thesis Supervisor: Sangbae Kim
Title: Associate Professor
This academic paper features our DYNAMIXEL XM430 all-in-one smart actuators
All credit goes to: Alexander Hattori from MASSACHUSETTS INSTITUTE OF TECHNOLOGY