Dexterous Three-Finger Gripper based on Offset Trimmed Helicoids (OTHs)
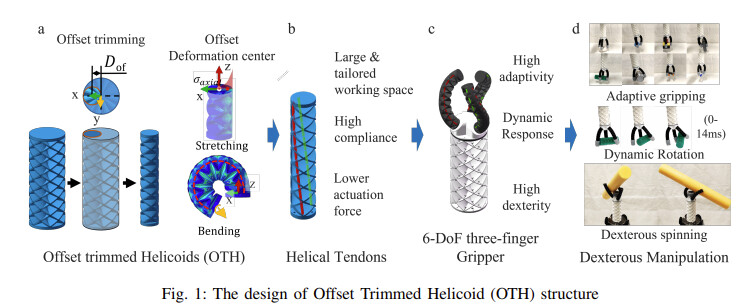
Abstract— This study presents an innovative offset-trimmed helicoids (OTH) structure, featuring a tunable deformation center that emulates the flexibility of human fingers. This design significantly reduces the actuation force needed for larger elastic deformations, particularly when dealing with harder materials like thermoplastic polyurethane (TPU). The incorporation of two helically routed tendons within the finger enables both inplane bending and lateral out-of-plane transitions, effectively expanding its workspace and allowing for variable curvature along its length. Compliance analysis indicates that the compliance at the fingertip can be fine-tuned by adjusting the mounting placement of the fingers. This customization enhances the gripper’s adaptability to a diverse range of objects. By leveraging TPU’s substantial elastic energy storage capacity, the gripper is capable of dynamically rotating objects at high speeds, achieving approximately 60° in just 15 milliseconds. The three-finger gripper, with its high dexterity across six degrees of freedom, has demonstrated the capability to successfully perform intricate tasks. One such example is the adept spinning of a rod within the gripper’s grasp.
Powered by DYNAMIXEL
All Credits Go To: Qinghua Guan, Hung Hon Cheng, and Josie Hughes
Full Research Paper: https://arxiv.org/pdf/2503.00574
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn