We are a few months away from competing in the Mexican Robotics Tournament (TMR) Humanoid Kidsize Competition organized by the Mexican Robotics Federation and the best way we found to test our high-level control algorithms developed in ROS is by removing the head from our humanoid robots and placing it on a mobile robot.
We are working on tracking the ball so that the humanoid robot can walk towards it and eventually kick it.
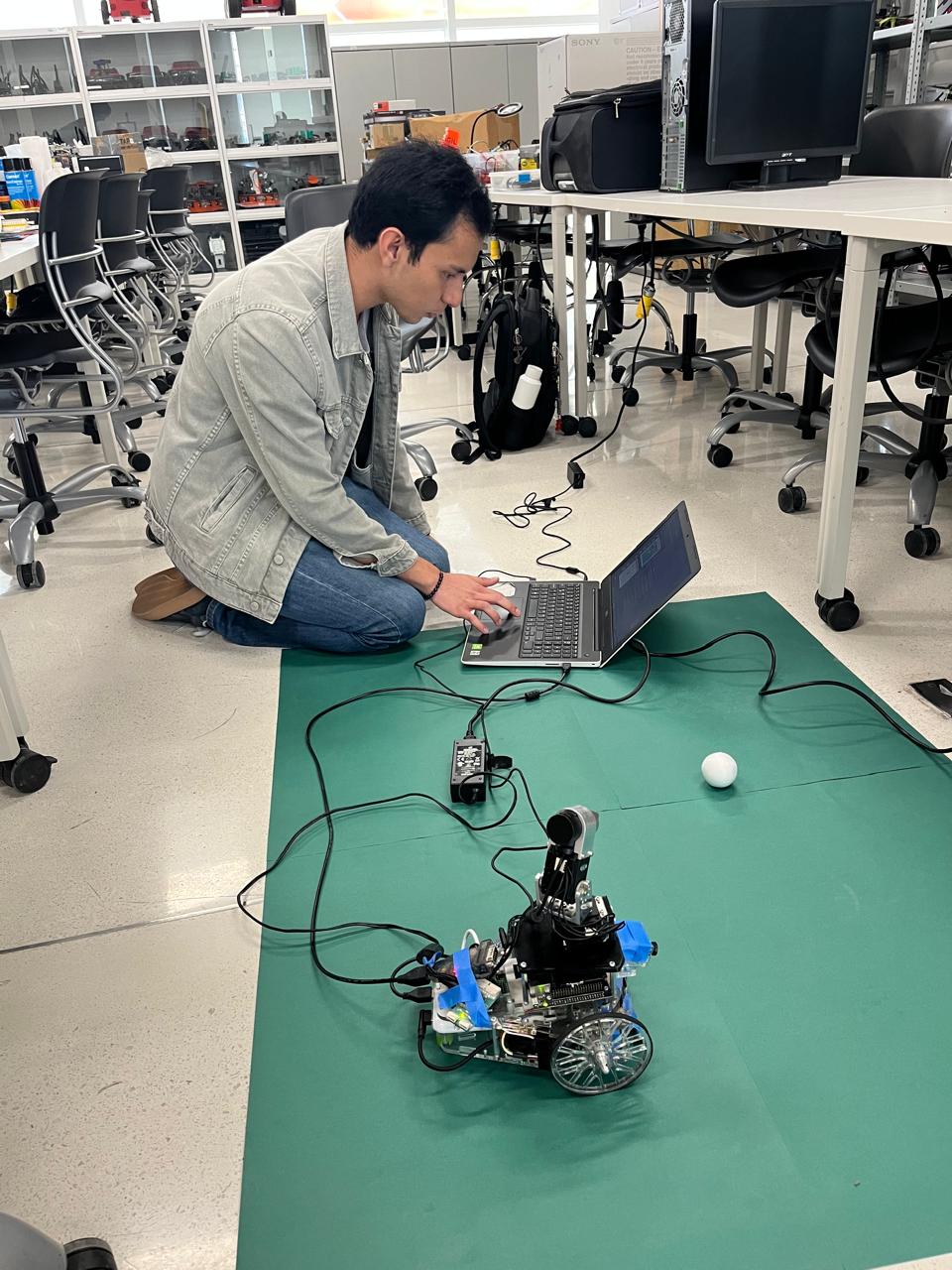
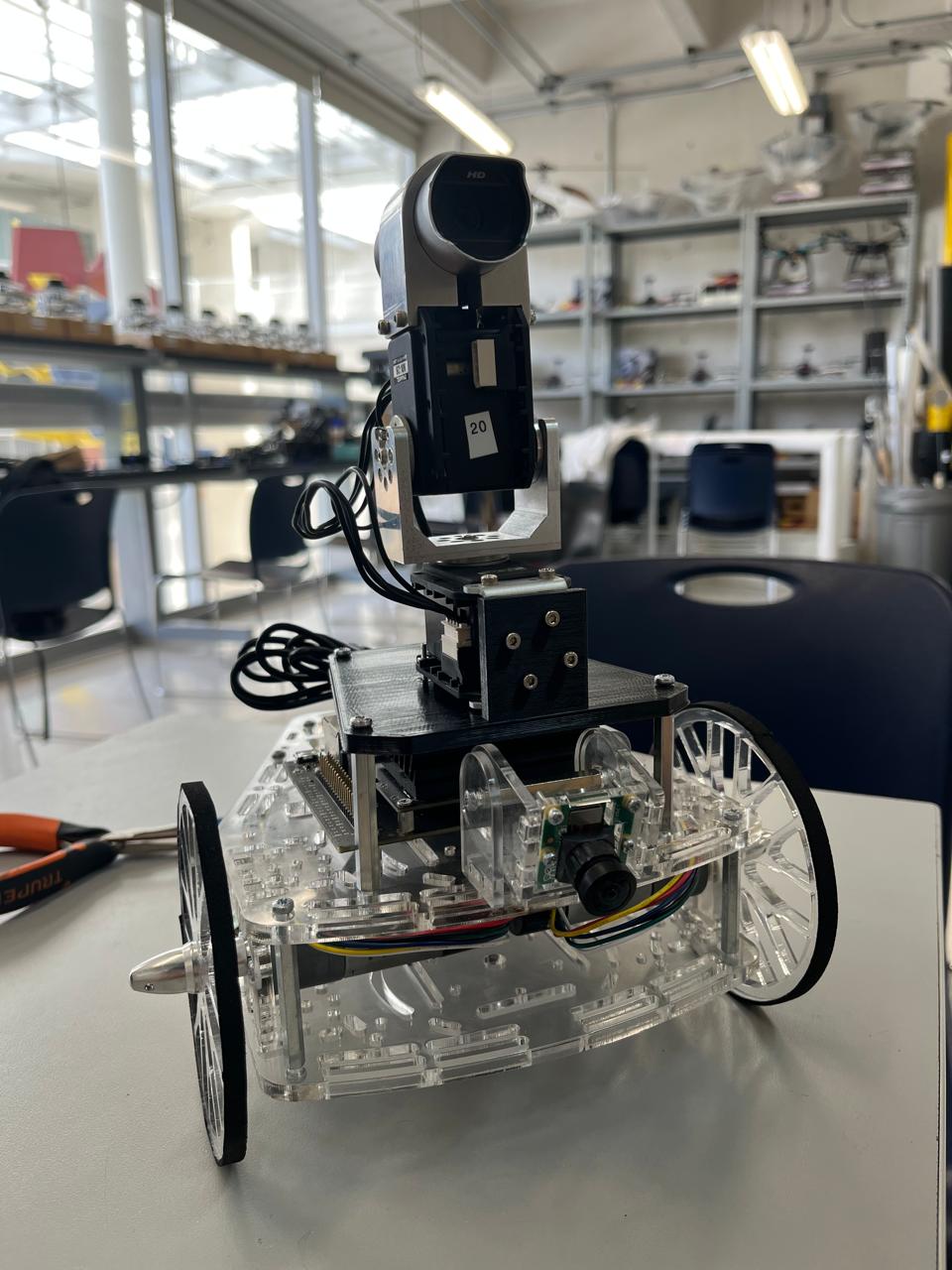
To achieve this we connected a camera to the main computer where we are running a ball detection algorithm, based on this information the Dynamixel MX motors adjust the tilt and pan of the robot’s neck to center the ball in the image. Then, the controller sends a Twist ROS message to the mobile robot to maneuver towards the ball.
By doing this our main aim is to test the main controller on a robot that will not fall while walking.
This also alows us to work on the low level control (walking stability on Open CR) and the high level control (state machine on NUC) separately and integrate at the end using ROS messages.